robogate-failure-dictionary
收藏RoboGate Failure Dictionary 数据集概述
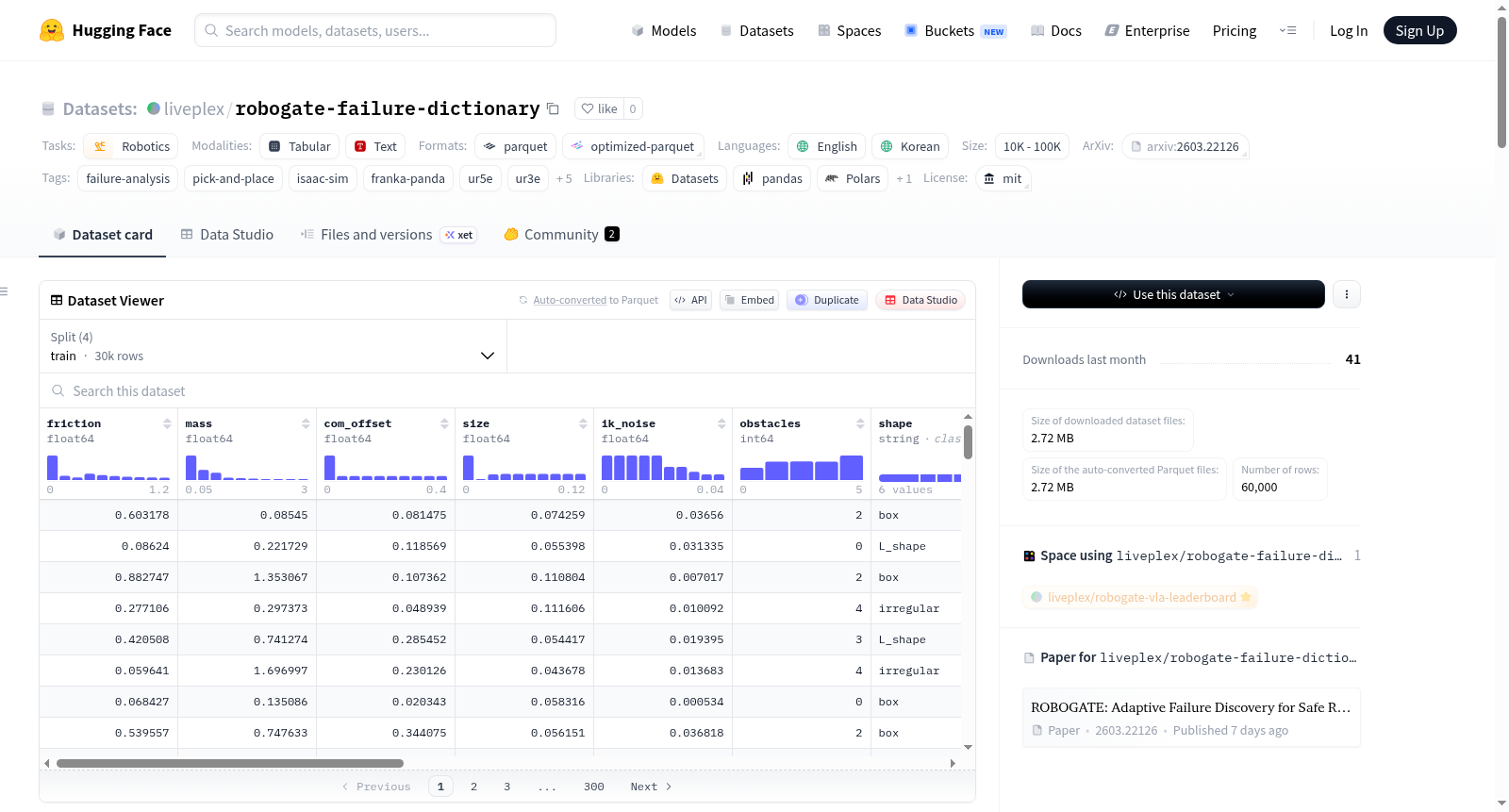
数据集基本信息
- 数据集名称:RoboGate Failure Dictionary
- 发布者:RoboGate Team
- 许可协议:MIT
- 主要任务类别:机器人学
- 标签:故障分析、抓取放置、Isaac Sim、Franka Panda、UR5e、UR3e、UR10e、领域随机化、拉丁超立方采样、自适应采样、物理人工智能
- 数据规模:10K<n<100K
- 语言:英语、韩语
核心描述
一个从NVIDIA Isaac Sim物理模拟中收集的机器人AI故障模式结构化数据库,采用两阶段自适应采样方法。每个实验记录了机器人在抓取放置任务中成功或失败的确切条件。包含超过50,000个经过物理验证的抓取放置故障模式,覆盖4种机器人。
关键统计
| 机器人/配置 | 实验数量 | 成功率 |
|---|---|---|
| Franka Uniform | 10,000 | 33.3% |
| Franka Boundary | 10,000 | 63.8% |
| UR5e | 10,000 | 74.3% |
| UR3e | 10,000 | 10.0% |
| UR10e | 10,000 | 0.0% |
| 总计 | 50,000+ | — |
| Franka 综合 | — | 48.6% |
| 风险模型AUC | 0.65 (Uniform) / 0.777 (Boundary) | — |
| 采样方法 | Uniform LHS / Boundary LHS / Two-Stage | — |
主要发现
- 最强故障预测因子:摩擦系数 × 质量的交互作用(z = -10.00)
- 摩擦阈值:0.492 ± 0.031(低于此值将引发故障级联)
- 通用危险区:质量 > 0.93 kg时,所有机器人成功率均低于40%
- 边界方程:μ*(m) = (1.469 + 0.419m) / (3.691 - 1.400m)
- AUC提升:通过边界聚焦采样,AUC从0.65提升至0.777(+19.5%)
- 故障模式转变:摩擦系数降低 → 超时 → 碰撞 → 抓取失败
两阶段自适应采样
- 第一阶段 - 均匀探索(40,000个实验):使用拉丁超立方采样均匀覆盖参数空间,识别边界区域并建立初始风险模型(AUC 0.65)。涵盖Franka Panda 10K和UR5e 10K。
- 第二阶段 - 边界聚焦(10,000个实验):仅针对Franka Panda,在边界/过渡区域(特别是摩擦阈值0.492附近)进行集中采样,揭示了均匀采样无法发现的故障模式转变,将风险模型AUC提升至0.777。
通用危险区(质量 > 0.93 kg)
| 质量范围 | Franka 成功率 | UR5e 成功率 |
|---|---|---|
| 0.93 – 1.23 kg | 21.4% | 30.9% |
| 1.23 – 1.52 kg | 14.9% | 25.3% |
| 1.52 – 1.82 kg | 12.5% | 28.9% |
| 1.82 – 2.11 kg | 6.6% | 28.1% |
参数空间
| 参数 | 范围 | 尺度 | 参考论文 |
|---|---|---|---|
| 摩擦系数 | 0.05 – 1.2 | 对数均匀 | SIMPLER 2024 |
| 质量 | 0.05 – 2.0 kg | 对数均匀 | SIMPLER 2024 |
| 质心偏移 | 0.0 – 0.40 | 均匀 | Suction Grasp 2025 |
| 尺寸 | 0.02 – 0.12 m | 均匀 | SIMPLER 2024 |
| 逆运动学噪声 | 0.0 – 0.04 rad | 均匀 | ICRA Sim2Real 2025 |
| 障碍物数量 | 0 – 4 | 整数 | RoboFAC 2025 |
| 形状 | 5种类型 | 分类 | Grasp Anything 2024 |
| 放置类型 | 14种类型 | 分类 | ALEAS 2025 |
研究基础
| 设计选择 | 参考论文 | 年份 |
|---|---|---|
| 两阶段自适应采样 | ALEAS | 2025 |
| 摩擦系数 × 质量交互作用 | SIMPLER | CoRL 2024 |
| 故障分类法 | RoboFAC | NeurIPS 2025 |
| 跨机器人验证 | RoboMIND | RSS 2025 |
| UR系列特定故障 | Guardian | ICRA 2025 |
| 置信区间 | SureSim | Badithela 2025 |
| GPU模拟 | Isaac Lab | NVIDIA 2025 |
| 抓取评估 | Isaac Sim Grasping SDG | NVIDIA 2025 |
VLA基准测试 - 4模型排行榜
在RoboGate的68个场景对抗性测试套件上评估了四个视觉语言动作模型。所有模型成功率均为0%,包括NVIDIA官方的GR00T N1.6模型。
| 模型 | 参数量 | 成功率 | 置信度 | 故障模式 |
|---|---|---|---|---|
| 脚本控制器 | — | 100% (68/68) | 76/100 | — |
| GR00T N1.6 (NVIDIA) | 3B | 0% (0/68) | 1/100 | 抓取失败 + 碰撞 |
| OpenVLA (Stanford + TRI) | 7B | 0% (0/68) | 27/100 | 以抓取失败为主,无碰撞 |
| Octo-Base (UC Berkeley) | 93M | 0% (0/68) | 1/100 | 抓取失败 79%,碰撞 21% |
| Octo-Small (UC Berkeley) | 27M | 0% (0/68) | 1/100 | 抓取失败 79.4%,碰撞 20.6% |
模型规模并非瓶颈,即使是NVIDIA旗舰的30亿参数模型也无法弥合训练与部署之间的分布差距。
排行榜:https://robogate.io/vla 论文:https://arxiv.org/abs/2603.22126
使用方式
python from datasets import load_dataset
ds = load_dataset("liveplex/robogate-failure-dictionary") print(ds["train"][0])
过滤危险区
danger = ds["train"].filter(lambda x: x["zone"] == "danger") print(f"Danger zones: {len(danger)}")
引用
bibtex @dataset{robogate_failure_dictionary_2026, title={RoboGate Failure Dictionary: 30K Physics-Validated Pick & Place Failure Patterns}, author={RoboGate Team}, year={2026}, url={https://huggingface.co/datasets/liveplex/robogate-failure-dictionary}, note={Franka Panda + UR5e, Two-Stage Adaptive Sampling, AUC 0.777} }
相关链接
- GitHub:https://github.com/liveplex-cpu/robogate-failure-dictionary
- RoboGate平台:https://github.com/liveplex-cpu/robogate