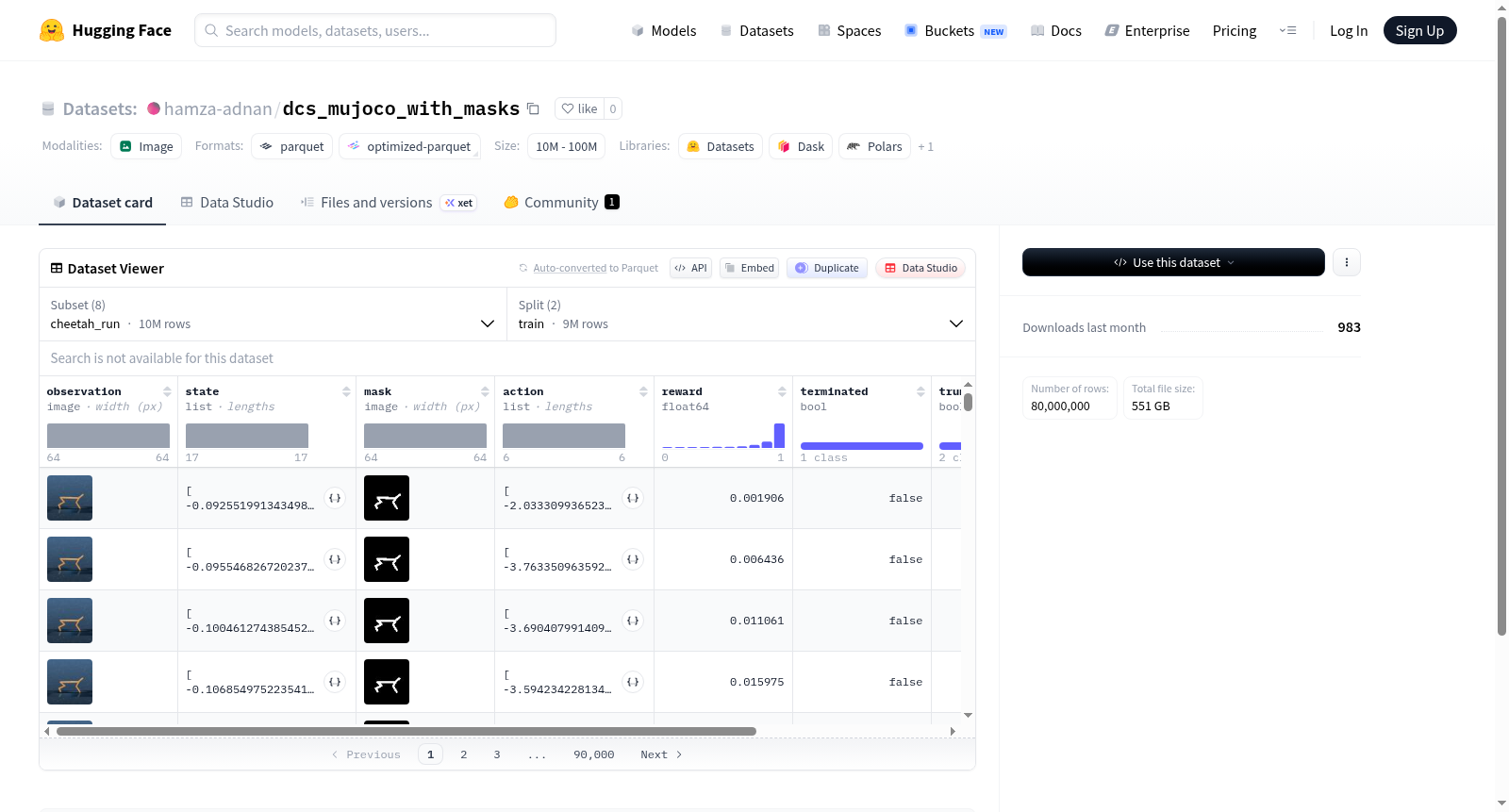
hamza-adnan/dcs_mujoco_with_masks
收藏Hugging Face2026-05-01 更新2026-04-26 收录
下载链接:
https://hf-mirror.com/datasets/hamza-adnan/dcs_mujoco_with_masks
下载链接
链接失效反馈官方服务:
资源简介:
该数据集是一个强化学习环境中的机器人控制数据集,包含多个配置,如猎豹奔跑、机器人跳跃和人类行走等任务。每个配置提供图像观察、状态向量、动作、奖励、终止标志等特征,用于训练和测试AI模型。数据集分为训练集和测试集,规模较大,适用于机器学习和计算机视觉研究。
This dataset is a robot control dataset in a reinforcement learning environment, including multiple configurations such as cheetah running, hopper hopping, and humanoid walking tasks. Each configuration provides features like image observations, state vectors, actions, rewards, termination flags, etc., for training and testing AI models. The dataset is divided into training and test sets, with a large scale, suitable for machine learning and computer vision research.
提供机构:
hamza-adnan
搜集汇总
数据集介绍
构建方式
在强化学习与计算机视觉交叉领域中,dcs_mujoco_with_masks数据集应运而生,旨在为视觉运动控制任务提供结构化的监督信号。该数据集基于MuJoCo物理仿真引擎,涵盖cheetah_run、hopper_hop、humanoid_walk及walker_run四类具身智能体运动场景,并为每类场景设计了标准版与低分心物(distractor_low)两种配置。每条样本均包含原始观测图像(observation)、真值掩码(mask)、预测掩码(pred_mask)、连续状态向量、离散动作、奖励值、终止标志及截断标志。数据采集自专家策略或强化学习代理的交互轨迹,并以每百万条样本为单位划分训练集(900万条)与测试集(100万条),确保大规模、高保真的仿真数据覆盖。
使用方法
研究者可通过HuggingFace Datasets库按需加载特定配置,例如`load_dataset('dcs_mujoco_with_masks', 'cheetah_run')`读取标准版本。数据以图像(observation, mask, pred_mask)和浮点数组(state, action)等结构化字段组织,支持直接转换为PyTorch或TensorFlow张量。典型用途包括训练基于视觉的模仿学习模型(如以观测和动作为输入-输出对)、开发掩码预测网络(以观测预测mask),或构建元强化学习基准。测试集与训练集均通过`split`参数独立访问,便于离线评估。研究者亦可结合`reward`、`terminated`等字段进行奖励预测或终止状态分类,拓展其在逆强化学习与安全断言中的应用边界。
背景与挑战
背景概述
dcs_mujoco_with_masks数据集是针对基于视觉的强化学习任务而构建的大规模基准数据集,由相关研究团队于近期推出。该数据集的核心研究问题在于如何利用图像观测与掩码信息来提升智能体在复杂物理环境中的决策能力,特别是在涉及目标干扰的场景下。数据集涵盖了cheetah_run、hopper_hop、humanoid_walk和walker_run等多个MuJoCo模拟环境,并提供了带有低干扰(distractor_low)条件的变体。每个样本包含观察图像、状态向量、掩码图像、动作、奖励及终止标志等丰富信息,训练集与测试集分别包含900万和100万样本,为算法开发与评估提供了充足的数据支持。这一资源在机器人控制、视觉强化学习及模型泛化性研究领域具有重要影响力,有望推动具身智能体在干扰环境下的鲁棒感知与决策能力的发展。
当前挑战
当前数据集面临的挑战主要体现在两个方面。首先,在领域问题层面,它着力于解决基于图像的强化学习中存在的背景干扰与物体混淆难题。传统方法常假设观察图像中仅包含任务相关目标,而现实场景中智能体需从包含干扰物的观测中提取有效特征,这对视觉编码与策略学习的联合优化提出了严峻考验。其次,在构建过程中,大规模数据的采集与标注面临巨大挑战。从MuJoCo模拟器中生成各具特色的运动数据需要精心设置物理参数并保证轨迹多样性,同时为每帧图像准确生成掩码与预测掩码,这要求在高效渲染管道的同时维持数据的一致性与保真度。此外,如何合理划分训练与测试集以评估模型对干扰物的泛化能力,也是数据构造时需仔细权衡的关键难题。
常用场景
经典使用场景
dcs_mujoco_with_masks数据集专为基于视觉的深度强化学习研究而构建,其最经典的使用场景是训练与评估面向连续控制任务的决策智能体。该数据集覆盖了猎豹奔跑、袋鼠跳跃、人形机器人行走与两足步行器奔跑等多种高维运动仿真环境,每个配置均提供像素级观测图像、动态分割掩码、状态向量与动作记录。研究者可利用其大规模标准化的轨迹数据,开展从像素到动作的端到端策略学习实验,尤其适合探索视觉表征如何与运动控制相结合,推动具身智能体在复杂物理仿真中的行为生成与优化。
解决学术问题
该数据集有效解决了基于原始视觉信息的运动控制研究中数据采集成本高昂与场景多样性不足的学术困境。通过提供包含掩码标注与干扰条件的多样化运动轨迹,它助力研究者探究分割掩码提示对策略学习的影响机制,以及视觉特征对齐在提升控制鲁棒性中的作用。同时,数据集中引入的低干扰配置为研究背景杂波对决策性能的干扰提供了可控的实验基准,从而推动学术界在视觉强化学习中如何利用结构化先验知识增强样本效率与泛化能力这一关键命题的深入理解。
实际应用
在实际应用中,dcs_mujoco_with_masks数据集为开发面向仿真环境的智能决策系统提供了可靠且可复现的训练与测试资源。例如,在游戏引擎驱动的机器人模拟器中,研究者可借助该数据集训练具有掩码感知能力的策略网络,使智能体更高效地聚焦于运动本体特征,从而提升在动态场景中的响应速度与动作精度。此外,该数据集所覆盖的运动模式与干扰配置,亦可用于验证视觉控制算法对背景变化与局部遮挡的适应性,为后续部署于虚拟仿真或特定工业模拟场景的具身智能系统奠定实验基础。
数据集最近研究
最新研究方向
在基于视觉的运动控制与强化学习领域,dcs_mujoco_with_masks数据集为可解释决策与鲁棒策略学习提供了崭新的基准平台。当前前沿研究聚焦于如何利用数据集中的观测图像与精确分割掩码,结合预测掩码(pred_mask)进行因果推理与注意力机制建模,从而在复杂环境(如Distractor Low配置)中实现对干扰物的显式忽略与核心动态聚焦。该数据集的推出与近年在具身智能、人机协作及仿生机器人等热点事件相呼应,尤其在Sim-to-Real迁移与零样本泛化研究中,其丰富的多体仿真场景(涵盖Cheetah、Hopper、Humanoid、Walker等)与海量标注样本(每配置达千万级)极大推动了基于视觉的隐式策略蒸馏与掩码引导的端到端学习方法的发展,对构建更加安全、透明及高效的自适应机器人控制系统具有深远意义。
以上内容由遇见数据集搜集并总结生成


