SynTouch
收藏tams.informatik.uni-hamburg.de2019-04-30 更新2025-02-19 收录
下载链接:
https://tams.informatik.uni-hamburg.de/research/datasets/index.php#biotac_single_contact_response
下载链接
链接失效反馈官方服务:
资源简介:
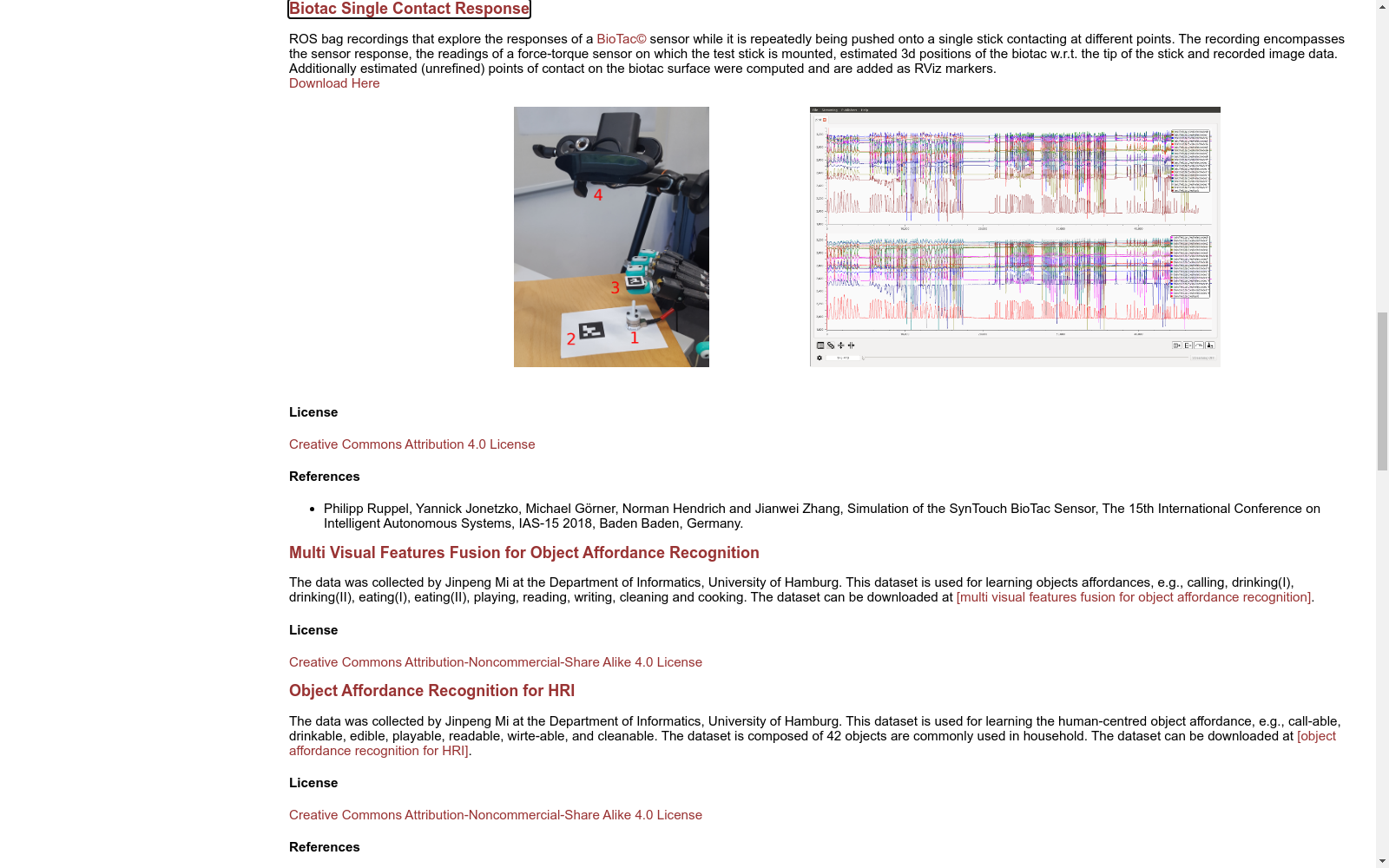
BioTac触觉传感器数据集由德国汉堡大学的研究团队创建,旨在为机器人触觉模拟提供实验基础。该数据集包含超过30万条触觉读数,涵盖BioTac传感器的多模态原始输出信号,如压力、电极值、温度等,以及通过六轴力/扭矩传感器和光学方法测量的接触点位置与外力。数据采集自多次实验,通过将BioTac传感器与不同形状的物体接触,记录其在不同接触条件下的响应。数据集的创建过程结合了物理实验与机器学习技术。研究人员利用实验装置记录传感器与物体接触时的力、位置和传感器输出,并通过优化算法校准接触点位置,以确保数据的高精度。该数据集主要用于开发和验证机器人触觉模拟模型,特别是针对复杂生物触觉传感器的模拟,可应用于机器人抓取控制、物体识别与表面属性分类等领域。
The BioTac tactile sensor dataset was created by a research team from the University of Hamburg, Germany, aiming to provide an experimental foundation for robotic tactile simulation. This dataset contains over 300,000 tactile readings, covering the multimodal original output signals of the BioTac sensor, such as pressure, electrode values, temperature, etc., as well as contact point positions and external forces measured via six-axis force/torque sensors and optical methods. The data was collected through multiple experiments, where the BioTac sensor was brought into contact with objects of different shapes, and its responses under various contact conditions were recorded. The development of this dataset combines physical experiments and machine learning techniques. Researchers used experimental setups to record the forces, positions and sensor outputs when the sensor contacts objects, and calibrated the contact point positions through optimization algorithms to ensure high data accuracy. This dataset is primarily used to develop and validate robotic tactile simulation models, especially simulations of complex biological tactile sensors, and can be applied to fields such as robot grasping control, object recognition and surface property classification.
提供机构:
德国汉堡大学
创建时间:
2019-04-30
搜集汇总
数据集介绍
背景与挑战
背景概述
BioTac触觉传感器数据集由德国汉堡大学研究团队精心打造,是机器人触觉模拟领域的权威资源。该数据集以超过30万条触觉读数为核心,全面覆盖BioTac传感器的多模态原始输出信号,包括压力、电极值、温度等关键参数,同时结合六轴力/扭矩传感器和光学方法,精准记录接触点位置与外力分布。数据采集过程通过与不同形状物体的多次接触实验完成,确保了数据的多样性和高精度。
以上内容由遇见数据集搜集并总结生成


