TRansPose
收藏arXiv2023-11-10 更新2024-06-21 收录
下载链接:
https://sites.google.com/view/transpose-dataset
下载链接
链接失效反馈官方服务:
资源简介:
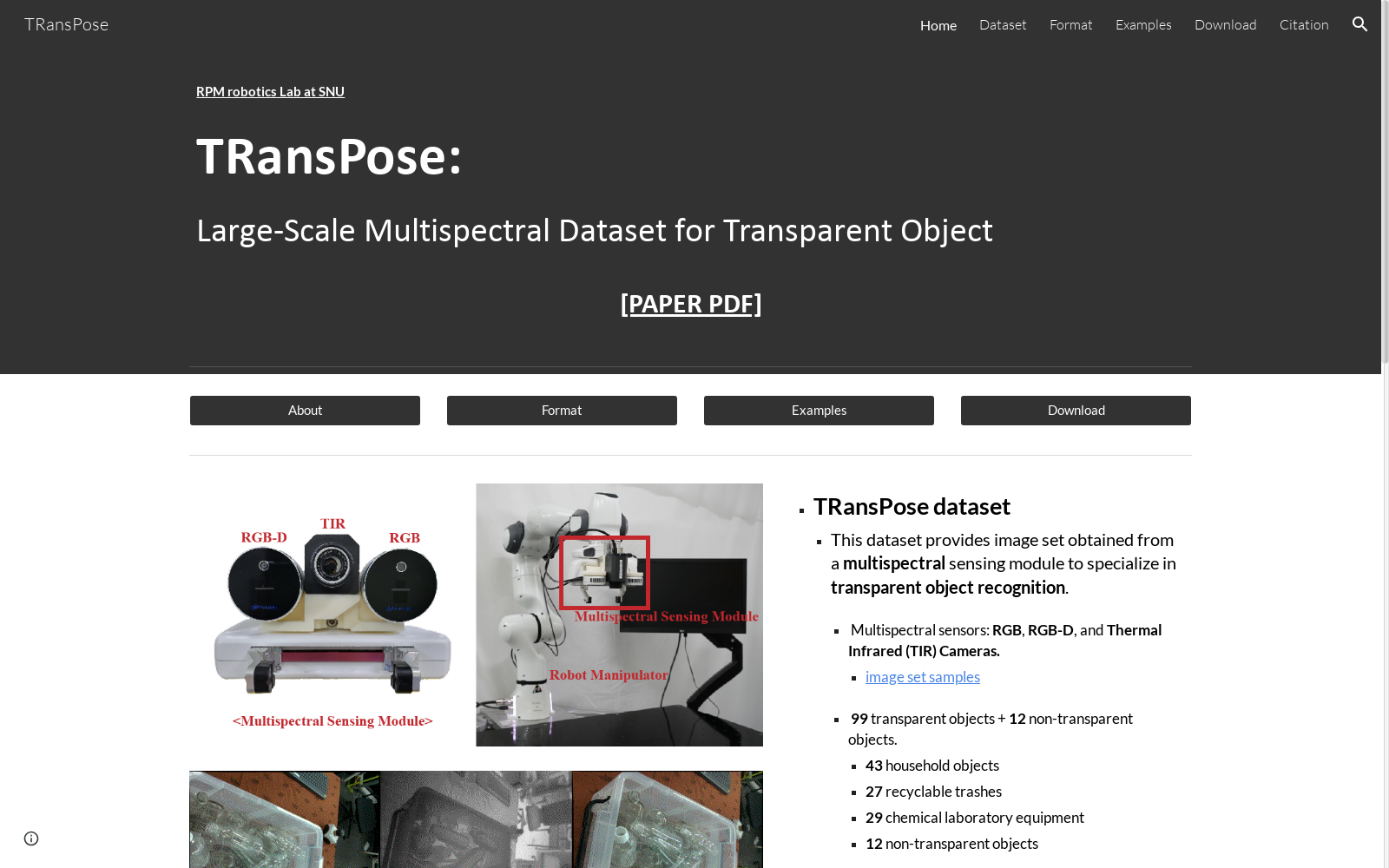
TRansPose是由首尔国立大学开发的大型多光谱数据集,专注于透明物体识别。该数据集包含99个透明物体,总计333,819张图像和4,000,056个标注,涵盖家庭用品、可回收垃圾和化学实验室设备等多个类别。数据采集使用了FLIR A65热红外相机和两个Intel RealSense L515 RGB-D相机,覆盖了多种复杂场景,如水填充物体、多重光照条件和密集杂乱环境。TRansPose旨在推动透明物体识别的研究,特别是在机器人和自动化领域中的应用,解决透明物体因材料特性带来的识别难题。
TRansPose is a large-scale multispectral dataset developed by Seoul National University, focusing on transparent object recognition. This dataset includes 99 individual transparent objects, with a total of 333,819 images and 4,000,056 annotations, covering multiple categories such as household items, recyclable waste, and chemical laboratory equipment. Data was collected using a FLIR A65 thermal infrared camera and two Intel RealSense L515 RGB-D cameras, covering various complex scenarios including water-filled objects, diverse lighting conditions, and dense cluttered environments. TRansPose aims to advance research on transparent object recognition, particularly its applications in robotics and automation, addressing the recognition challenges brought about by the material properties of transparent objects.
提供机构:
首尔国立大学
创建时间:
2023-07-11
搜集汇总
数据集介绍
构建方式
为了克服传统视觉传感器在识别透明物体时的局限性,本研究构建了一个名为TRansPose的大规模多光谱数据集。该数据集结合了立体RGB-D、热红外(TIR)图像和物体姿态,旨在促进透明物体研究。数据采集使用了一台FLIR A65热红外相机、两台Intel RealSense L515 RGB-D相机和一台Franka Emika Panda机器人操作臂。通过机器人操作臂的精确运动,研究人员获得了99个透明物体的333,819张图像和4,000,056个注释,包括实例级分割掩膜、真实姿态和完整深度信息。数据集覆盖了87个序列,涵盖了各种具有挑战性的现实生活场景,如充满水的物体、多样化的照明条件、严重的杂乱、非透明或半透明容器、塑料袋中的物体和多堆叠物体。
特点
TRansPose数据集的特点在于其大规模、多光谱和多样性。它包括99个透明物体,涵盖了43个家庭物品、27个可回收垃圾、29个化学实验室设备和12个非透明物体。数据集提供了333,819张图像和4,000,056个注释,包括实例级分割掩膜、真实姿态和完整深度信息。此外,数据集还涵盖了各种具有挑战性的现实生活场景,如充满水的物体、多样化的照明条件、严重的杂乱、非透明或半透明容器、塑料袋中的物体和多堆叠物体。这些特点使得TRansPose数据集成为研究透明物体识别的理想选择。
使用方法
TRansPose数据集的使用方法相对简单。首先,用户需要下载数据集,并将其解压缩到一个文件夹中。然后,用户可以使用提供的渲染代码生成结果图。此外,用户还可以使用数据集中的注释进行透明物体识别、分割、检测和姿态估计等任务。为了更好地利用数据集,用户可以参考数据集论文和相关文档,了解数据集的构建方式、特点和使用方法。
背景与挑战
背景概述
透明物体识别在日常生活中具有重要意义,但因其独特的材质特性,对传统视觉传感器来说是一个挑战。传统的RGB或深度相机难以准确感知透明物体。为了克服这一局限,热红外相机因其提供更好的可见性和形状信息而逐渐成为透明物体识别的解决方案。TRansPose数据集正是在这一背景下诞生的,它是一个大规模的多光谱数据集,结合了立体RGB-D、热红外图像和物体姿态,旨在推动透明物体研究。该数据集由韩国首尔国立大学机械工程系和高级机器与设计研究所的研究人员创建,于2023年11月发布。TRansPose数据集包含了99个透明物体,包括43个家用物品、27个可回收垃圾和29个化学实验室物品,以及12个非透明物体。数据集包含了333,819张图像和4,000,056个标注,包括实例级分割掩膜、真实姿态和完整深度信息。该数据集的创建为透明物体识别研究提供了宝贵的数据资源,对机器人、自动化等领域具有重要影响力。
当前挑战
TRansPose数据集在创建过程中面临了一些挑战。首先,透明物体由于其材质特性,在RGB或深度相机中难以准确感知,导致深度图难以获取。其次,同步多个传感器以获取高质量的数据序列也是一个挑战。为了解决这个问题,研究人员采用了离散数据采集的方法,通过预定义机器人操作器的轨迹来获取数据。此外,为了提高标注的准确性,研究人员开发了一种基于对象掩膜优化的方法,通过手动标注少量图像来优化物体姿态。这些挑战的克服为透明物体识别研究提供了宝贵的数据资源,并为未来的研究指明了方向。
常用场景
经典使用场景
透明物体在日常生活中随处可见,但由于其独特的材料特性,传统的视觉传感器难以对其进行识别。为了克服这一局限性,本研究提出了TRansPose数据集,这是一个大规模的多光谱数据集,结合了立体RGB-D、热红外(TIR)图像和物体姿态,旨在促进透明物体研究。该数据集包括99个透明物体,包括43个家庭用品、27个可回收垃圾、29个化学实验室等效物和12个非透明物体,共333,819张图像和4,000,056个注释,提供了实例级分割掩码、真实姿态和完整的深度信息。该数据集涵盖了各种具有挑战性的真实生活场景,包括充满水的物体、不同的光照条件、严重的杂乱、非透明或半透明容器、塑料袋中的物体和多堆叠物体。
解决学术问题
透明物体由于其固有的材料特性,缺乏独特的特征和纹理,容易受到背景干扰,因此传统的基于RGB的方法在识别透明物体时面临挑战。TRansPose数据集通过引入热红外(TIR)相机,利用其独特的特性,提供了一种新的解决方案。TIR相机通过测量物体表面发出的温度,能够在8-12微米的波长范围内工作,这一波长范围不会被透明物体的典型材料穿透,从而能够清晰地感知透明物体的整体形状,简化分割和姿态估计等任务。此外,TIR相机在现实生活场景中也很有用,因为它可以穿透乙烯基,使观察封闭在塑料袋中的物体成为可能。该数据集为透明物体识别研究提供了新的方向,并为机器人感知和操作透明物体开辟了新的可能性。
衍生相关工作
TRansPose数据集的提出为透明物体识别研究提供了新的方向,并衍生出一系列相关工作。例如,一些研究利用TIR图像进行透明物体分割和姿态估计,取得了良好的效果。此外,一些研究还将TIR图像与其他传感器数据进行融合,以提高透明物体识别的准确性和鲁棒性。未来,随着TIR技术的不断发展,TRansPose数据集有望在更多领域得到应用,推动透明物体识别研究的进一步发展。
以上内容由遇见数据集搜集并总结生成


