RealToF
收藏arXiv2024-12-18 更新2024-12-25 收录
下载链接:
https://www.youtube.com/watch?v=jy-Sp7T1LVs&feature=youtu.be
下载链接
链接失效反馈官方服务:
资源简介:
RealToF数据集是由中南大学和清华大学等机构创建的,旨在支持移动设备上的ToF和双目立体视觉深度感知研究。该数据集包含150个多样化的室内场景,使用华为P40Pro设备上的ToF和双RGB摄像头采集数据,并通过Intel RealSense深度摄像头和激光测距仪获取精确的地面真实数据。数据集的创建过程结合了物理原理和环境因素,确保了深度误差的准确表征。RealToF数据集主要应用于3D重建和3D分割等下游任务,旨在提高移动设备上的深度感知精度。
The RealToF Dataset was developed by institutions including Central South University and Tsinghua University, aiming to support research on ToF and binocular stereo vision-based depth perception on mobile devices. It comprises 150 diverse indoor scenes, with data collected using the ToF and dual RGB cameras on a Huawei P40 Pro device, while precise ground-truth data was acquired via an Intel RealSense depth camera and a laser rangefinder. The development of the RealToF Dataset integrates physical principles and environmental factors to ensure accurate characterization of depth errors. Primarily utilized for downstream tasks such as 3D reconstruction and 3D segmentation, the RealToF Dataset aims to improve the accuracy of depth perception on mobile devices.
提供机构:
中南大学、清华大学、上海传音控股有限公司、首尔国立大学
创建时间:
2024-12-18
搜集汇总
数据集介绍
构建方式
RealToF数据集的构建采用了多设备协同采集的方式,结合了华为P40 Pro的ToF传感器和双RGB摄像头,确保了数据的多样性和真实性。为了获取高精度的深度真值,研究人员使用了Intel RealSense深度相机和激光测距仪进行联合标定,确保了深度数据的准确性。此外,数据采集过程中还采用了多场景、多设备的策略,涵盖了150个不同的室内场景,确保了数据集的广泛性和代表性。
特点
RealToF数据集的特点在于其高精度的深度真值和多模态数据的对齐。数据集不仅包含了ToF深度图和立体匹配深度图,还提供了RGB图像和法线图,确保了数据的多样性和丰富性。此外,数据集中的每个场景都经过了严格的像素级对齐,避免了区域遮挡和像素位移问题,确保了数据的准确性和一致性。RealToF数据集还涵盖了多种材质和复杂场景,能够有效支持深度感知系统的训练和验证。
使用方法
RealToF数据集主要用于训练和验证深度感知系统,特别是ToF与立体匹配融合的模型。研究人员可以通过该数据集进行深度误差分析、多模态数据融合以及深度图的精确生成。数据集中的RGB图像、ToF深度图和立体匹配深度图可以作为输入,用于训练深度感知模型,而深度真值则用于模型的监督学习。此外,RealToF数据集还可以用于评估深度感知系统在3D重建、3D分割等下游任务中的性能,为深度感知技术的应用提供了坚实的基础。
背景与挑战
背景概述
RealToF数据集是由中央南大学、清华大学、上海传音控股有限公司及首尔国立大学的研究团队于2024年创建,旨在解决移动设备上的高精度深度感知问题。该数据集结合了双RGB摄像头和飞行时间(ToF)传感器的数据,通过多数据融合策略生成精确的深度图。RealToF的创建填补了现有数据集中缺乏真实场景下ToF与立体匹配融合数据的空白,推动了移动设备在3D重建、3D分割等深度依赖任务中的应用。该数据集包含150个多样化的室内场景,数据采集设备包括华为P40 Pro的ToF和双RGB摄像头,并通过Intel RealSense深度相机和激光测距仪提供高精度的地面真实数据。
当前挑战
RealToF数据集在构建过程中面临两大挑战。首先,移动设备上的ToF和立体匹配深度感知原理存在显著差异,导致深度误差分布不同。ToF对物体材质和表面特性敏感,而立体匹配则受物体纹理分布和光照条件影响较大。这种异质性使得精确比较两种方法的深度测量结果变得复杂,且缺乏有效的移动ToF深度误差检测器。其次,现有ToF与立体匹配融合数据集在场景多样性、规模和真实性方面存在局限,难以全面反映真实环境中的深度测量影响因素。RealToF通过采集多样化的室内场景数据,并确保像素级对齐和精确的地面真实数据,克服了这些挑战,为ToF与立体匹配融合研究提供了高质量的数据支持。
常用场景
经典使用场景
RealToF数据集在移动设备上的深度感知系统中发挥了关键作用,特别是在结合双RGB摄像头和飞行时间(ToF)传感器的深度感知任务中。该数据集通过提供精确的深度误差指示(DEI)模态,帮助系统在复杂环境中生成高精度的深度图。其经典使用场景包括3D重建、3D分割、增强现实(AR)以及景深效果渲染等任务,显著提升了移动设备在这些应用中的表现。
衍生相关工作
RealToF数据集的发布推动了多个相关领域的研究进展。基于该数据集,研究者开发了多种深度感知算法,如MobiFuse系统,该系统通过融合ToF和立体匹配的深度信息,显著提升了深度测量的精度和效率。此外,RealToF还激发了更多关于ToF-立体融合的研究,例如基于深度误差特征的融合策略和轻量级深度感知模型的开发。这些工作不仅扩展了数据集的应用范围,也为移动设备深度感知技术的进一步发展提供了理论支持。
数据集最近研究
最新研究方向
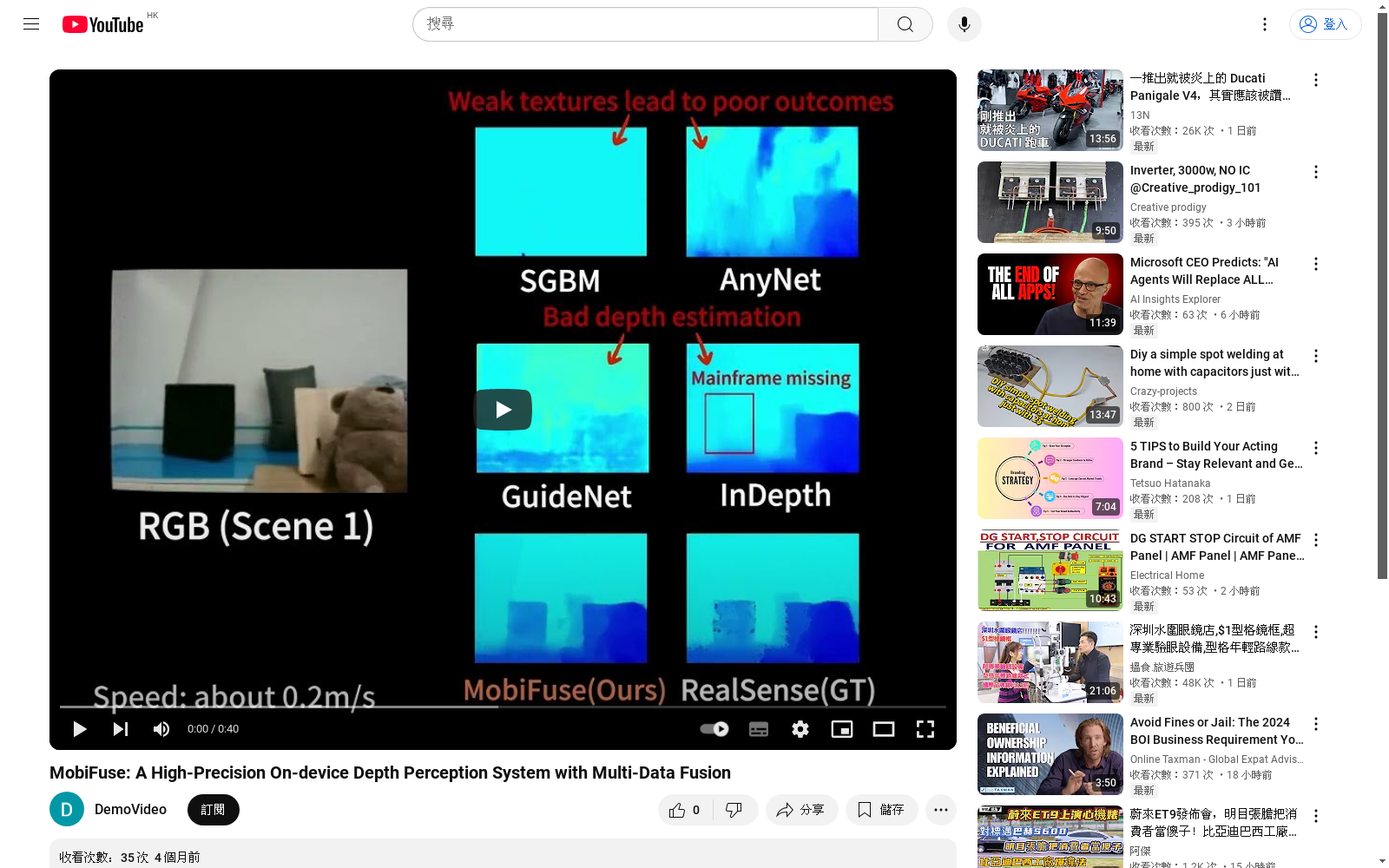
在移动设备深度感知领域,RealToF数据集的最新研究方向聚焦于高精度的深度感知系统开发,特别是通过融合双RGB摄像头和飞行时间(ToF)传感器的数据来提升深度测量的准确性。研究团队提出了一种名为MobiFuse的系统,该系统通过引入深度误差指示(DEI)模态,结合ToF和立体匹配的几何特征,生成精确的深度图。此外,研究还创建了RealToF数据集,用于训练和验证模型。实验结果表明,MobiFuse在减少深度测量误差方面表现出色,误差降低了高达77.7%,并在3D重建和3D分割等下游任务中展现了强大的泛化能力。这一研究不仅推动了移动设备深度感知技术的发展,还为增强现实(AR)和虚拟现实(VR)等应用提供了更可靠的技术支持。
相关研究论文
- 1MobiFuse: A High-Precision On-device Depth Perception System with Multi-Data Fusion中南大学、清华大学、上海传音控股有限公司、首尔国立大学 · 2024年
以上内容由遇见数据集搜集并总结生成


