HO-3D v3
收藏arXiv2021-07-02 更新2024-06-21 收录
下载链接:
https://www.tugraz.at/index.php?id=40231
下载链接
链接失效反馈官方服务:
资源简介:
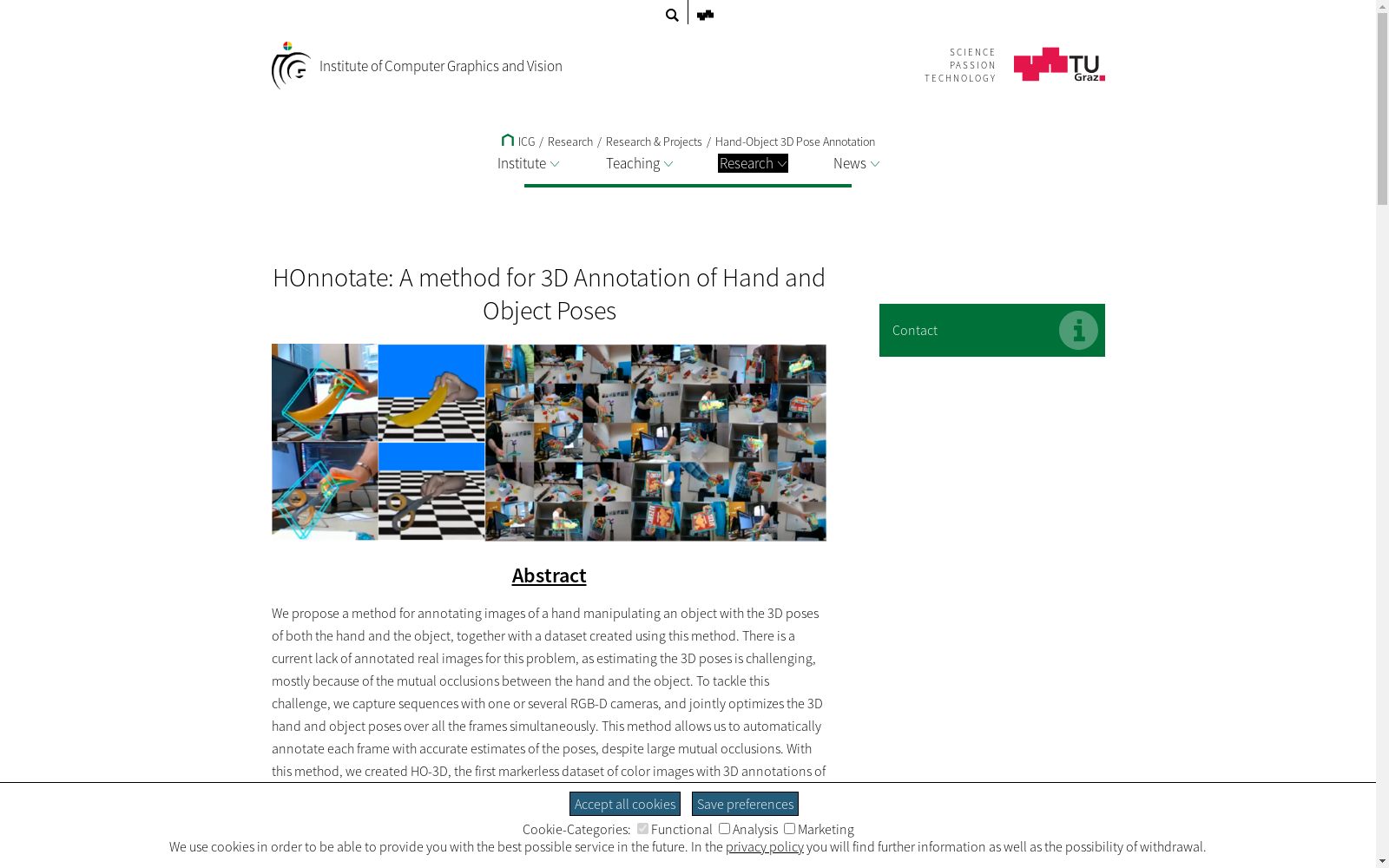
HO-3D v3数据集由计算机图形学与视觉研究所创建,专注于手与物体交互的3D姿态标注。该数据集包含83,325张图像,涵盖多种交互场景,通过优化技术提升标注准确性,特别关注手与物体接触区域的精确估计。创建过程中,采用了改进的优化算法,直接优化关节角度而非PCA组件,提高了姿态估计的准确性。该数据集主要应用于机器人抓取和交互研究,旨在解决手部动作与物体交互的精确模拟问题。
The HO-3D v3 dataset was developed by the Computer Graphics and Vision Institute, focusing on 3D pose annotation for hand-object interactions. It contains 83,325 images covering diverse interaction scenarios, and adopts optimization techniques to improve annotation accuracy, with particular emphasis on precise estimation of hand-object contact regions. During its creation, an improved optimization algorithm was adopted, which directly optimizes joint angles instead of PCA components, thereby enhancing the accuracy of pose estimation. This dataset is mainly applied to robotic grasping and interaction research, aiming to address the problem of accurate simulation of hand movements and their interactions with objects.
提供机构:
计算机图形学与视觉研究所,格拉茨理工大学,格拉茨,奥地利
创建时间:
2021-07-02
搜集汇总
数据集介绍
构建方式
HO-3D v3数据集在原有HO-3D v2的基础上,采用改进的优化技术对数据集进行了重新标注。该数据集包含手与物体交互场景的图像序列,每个序列均标注了手和物体的三维姿态。新的标注通过引入交叉熵损失函数、解剖学方向的关节轴优化以及基于球体的排斥项来提升标注精度。
特点
HO-3D v3相较于前一代版本,提供了更为精确的手和物体姿态标注,从而能够更准确地估计手与物体接触区域。数据集在动态和静态抓取场景中展现出更多的接触区域,且具有相似的内穿透距离,显著提高了抓取质量。此外,数据集在构建时注重了解剖学结构的合理性,使得生成的姿态更为自然。
使用方法
用户可以通过分析数据集中的图像序列和对应的三维姿态标注来研究手与物体的交互。数据集提供了精确的接触区域信息,有助于深度学习和计算机视觉算法的训练与评估,特别是在手部姿态估计和物体识别等领域。用户可直接使用数据集中的标注信息,或将其作为基准数据进行算法性能的对比研究。
背景与挑战
背景概述
HO-3D v3数据集是在2021年7月1日由Shreyas Hampali、Sayan Deb Sarkar和Vincent Lepetit等研究人员于格拉茨技术大学计算机图形与视觉研究所及巴黎东部大学发表的。该数据集继HO-3D v2版本之后,提供了更为精确的手部与物体三维姿态标注,旨在改善手与物体接触区域的估计。HO-3D v3的发布,对于手部与物体交互的三维姿态估计研究领域具有重要影响,其精确的标注为相关算法的研究与评估提供了宝贵的基准数据。
当前挑战
该数据集在构建过程中主要面临的挑战包括:1)如何提高手部与物体姿态的三维标注精度;2)优化过程中确保标注的解剖学合理性;3)减少手部与物体间的穿透错误。研究团队通过改进优化方法、使用交叉熵损失函数、调整关节轴方向以及采用基于球体的排斥项等方法应对这些挑战,以实现更高质量的标注效果。此外,数据集在动态抓握场景的标注准确性方面也面临一定的挑战,这需要更精细的标注技术和算法创新。
常用场景
经典使用场景
HO-3D v3数据集在计算机视觉和图形学领域中被广泛用于研究手部与物体的三维交互。其经典使用场景包括精确估计手部与物体的三维姿态,以及分析手部与物体接触区域的准确性。
衍生相关工作
基于HO-3D v3数据集,研究者们衍生出了一系列相关工作,如改进的手部姿态估计算法、接触区域检测技术,以及结合深度学习的手部与物体交互模型,进一步推动了相关领域的研究进展。
数据集最近研究
最新研究方向
HO-3D v3数据集的改进主要集中于提升手和物体姿态标注的准确性。通过采用优化的方法,该数据集提供了更为精确的手和物体姿态标注,从而能够更准确地估计手与物体接触区域。研究者在原有优化技术的基础上进行了三项关键改进:一是引入了基于交叉熵的轮廓不一致性项,二是直接优化关节角度而非其主成分分析组件,三是采用了简化的基于球体的排斥项。这些改进使得HO-3D v3在动态和静态抓握场景中展示了更准确的抓握姿态和更真实的接触区域,对于手-物体交互的建模与仿真具有重要意义。
相关研究论文
- 1HO-3D_v3: Improving the Accuracy of Hand-Object Annotations of the HO-3D Dataset计算机图形学与视觉研究所,格拉茨理工大学,格拉茨,奥地利 · 2021年
以上内容由遇见数据集搜集并总结生成


