Pepper-4D
收藏github2025-12-21 更新2026-01-06 收录
下载链接:
https://github.com/foysalahmed10/Pepper-4D
下载链接
链接失效反馈官方服务:
资源简介:
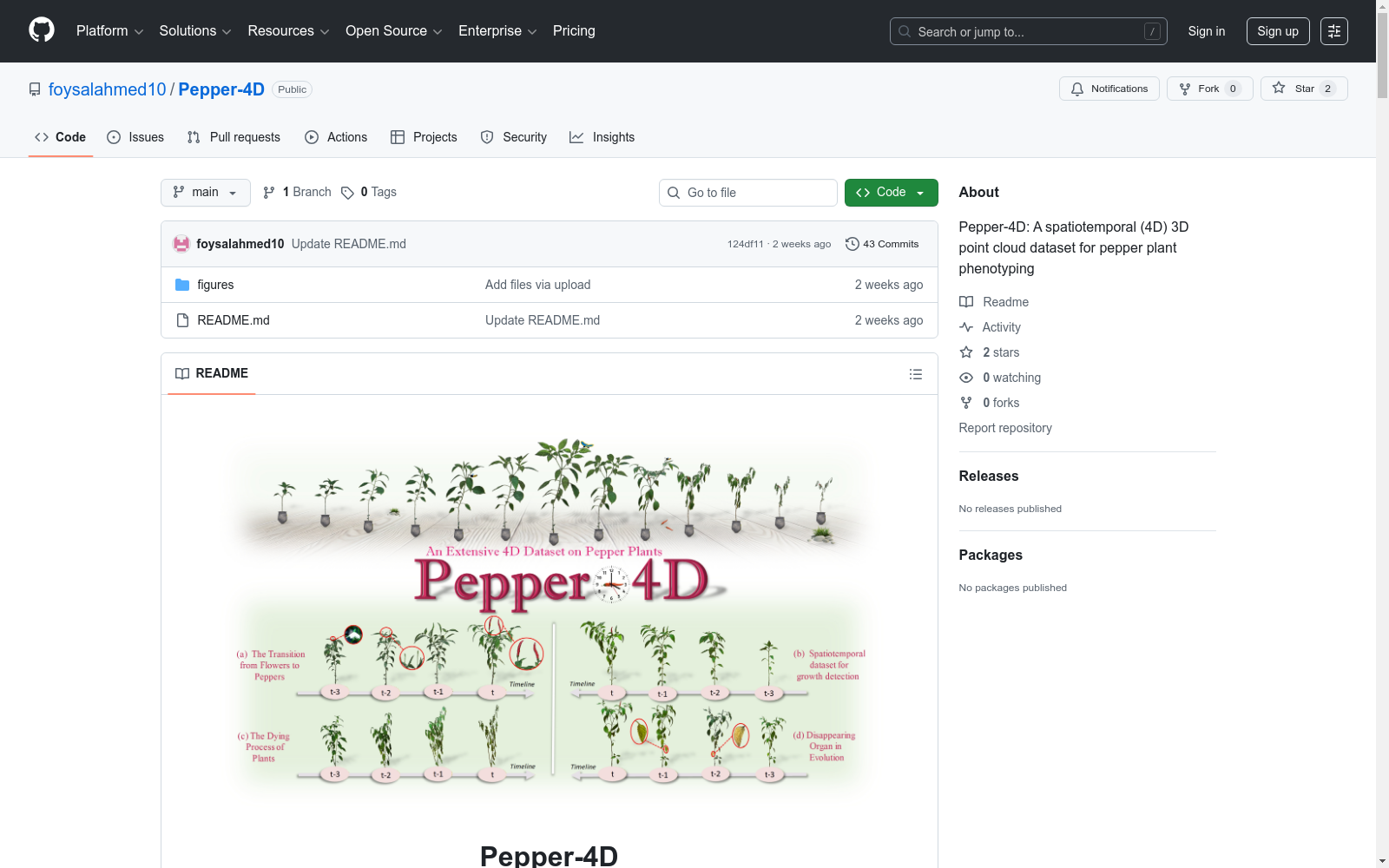
Pepper-4D是一个全面的4D(3D + 时间)点云数据集,捕捉了辣椒植物在受控室内条件下的完整生长和发育过程。该数据集支持对植物结构、器官动态、时间生长模式和植物健康状况的详细分析,旨在作为3D植物点云判别和生成学习方法的基准资源。
Pepper-4D is a comprehensive 4D (3D + time) point cloud dataset that captures the full growth and development process of pepper plants under controlled indoor conditions. This dataset supports detailed analyses of plant architecture, organ dynamics, temporal growth patterns and plant health status, and is designed to serve as a benchmark resource for discriminative and generative learning methods focused on 3D plant point clouds.
创建时间:
2025-12-20
原始信息汇总
Pepper-4D 数据集概述
数据集简介
Pepper-4D 是一个全面的4D(3D + 时间)点云数据集,旨在捕获辣椒植物在受控室内条件下的完整生长和发育过程。该数据集填补了公开可用的辣椒植物时空3D数据集的空白,可作为3D植物点云判别性和生成性学习方法的基准资源。
核心属性
- 物种:辣椒(Capsicum annuum)
- 植物总数:29
- 点云总数:916
- 总点数:3.2272亿
- 总数据集大小:约20 GB
- 数据模态:3D点云(XYZ)
- 时间分辨率:每两天扫描一次
- 环境:室内受控条件
数据集子集
Pepper-4D 包含三个子集,分别捕获不同的生长场景和表型分析任务。
子集1 — 完整生命周期
- 植物数量:11
- 点云数量:460
- 描述:从早期营养生长到开花、结果和衰老的长期监测。
- 标注:包含语义、实例、时间和健康标签。
子集2 — 向地性测试
- 植物数量:8
- 点云数量:238
- 描述:专注于新器官检测和向地性测试的序列。
- 标注:包含新器官检测标签。
子集3 — 早期至中期生长
- 植物数量:10
- 点云数量:218
- 描述:具有快速结构变化的早期和中期生长阶段。
- 标注:无。
数据集结构与组织
数据集遵循统一的目录结构:
Pepper-4D/ ├── subset_1/ │ ├── plant_01/ │ │ ├── frames/ # 包含按时间排序的植物3D点云文件(.txt格式) │ │ └── labels/ │ │ ├── semantic/ # 逐点语义分割标签(如茎、叶) │ │ ├── instance/ # 逐点实例分割标签(每个整数对应一个单独的叶子) │ │ ├── temporal/ # 逐点时间跟踪标签(跨帧的相同ID表示同一物理器官) │ │ └── health/ # 帧级植物健康标签(正常或枯萎) ├── subset_2/ │ ├── plant_01/ │ │ ├── frames/ │ │ └── labels/ │ │ └── new_organs_detection/ # 新器官检测标签 └── subset_3/ ├── plant_01/ │ ├── frames/ │ └── labels/ # 无标注
支持的研究任务
- 植物健康分类
- 器官语义分割
- 器官实例分割
- 器官生长跟踪
- 新器官检测
- 时空植物表型分析
- 3D植物生成
数据获取与引用
- 下载链接:TO_BE_UPDATED (Google Drive / OneDrive)
- 引用格式: bibtex @article{pepper4d, title = {Pepper-4D}, author = {Ahmed, Foysal and others}, journal = {To be updated}, year = {2026} }
搜集汇总
数据集介绍
构建方式
在三维植物表型分析领域,精确捕捉植物生长动态对研究结构特征与器官演化至关重要。Pepper-4D数据集的构建采用了一套严谨的多阶段流程,首先在室内受控环境下对29株辣椒植株进行双日频率的多视角图像采集,随后通过运动恢复结构(SfM)与神经辐射场(NeRF)技术实现三维重建,生成时间对齐的点云序列。该流程涵盖图像预处理、点云生成与后处理环节,最终整合为包含916个点云、总计约3.23亿个数据点的时空数据集,有效支持植物全生命周期的高精度建模。
特点
作为辣椒植物的首款综合性四维点云数据集,Pepper-4D在时空覆盖与数据维度上展现出显著优势。其特点体现在双日高时间分辨率的连续采集策略,完整记录了从营养生长到开花结果的动态过程;数据集包含语义分割、实例标注、器官追踪及健康状态等多层次注释,且通过SfM与NeRF融合技术实现了带有色彩信息的高保真重建。与现有作物三维数据集相比,该资源在时序连续性、标注丰富性与模态完整性方面提供了更为系统的基准。
使用方法
研究者可通过下载约20GB的数据包获取Pepper-4D,数据集按三个子集组织,分别对应全生命周期监测、向地性实验与早中期生长阶段。每个子集以植物为单位存放点云序列与对应标注文件,点云以文本格式存储XYZ坐标,标注则涵盖语义、实例、时序及健康分类等维度。该数据集适用于植物健康评估、器官分割与追踪、新器官检测及生成式模型等多种任务,用户可依据任务需求调用相应子集的标注数据,开展 discriminative 与 generative 学习方法的验证与开发。
背景与挑战
背景概述
在植物表型组学领域,三维(3D)表型分析对于解析植物结构、器官级性状及生长动态至关重要。尽管二维与三维视觉技术近年取得显著进展,但面向辣椒植物的公开时空三维数据集仍极为匮乏。为填补这一空白,由Foysal Ahmed、Dong Li等人组成的团队于2026年推出了Pepper-4D数据集。该数据集作为一个综合性四维(3D+时间)点云资源,系统记录了辣椒植物在室内受控环境下的完整生长与发育过程,旨在为三维植物点云的判别性与生成性学习方法提供基准支持,从而推动植物结构分析、器官动态监测及健康状态评估等相关研究的深入发展。
当前挑战
Pepper-4D致力于解决植物表型组学中时空三维数据分析的核心挑战,其首要难题在于如何从高噪声、非结构化的点云数据中精确分割与跟踪动态变化的植物器官,并实现跨时间序列的器官身份一致性维护。在数据集构建层面,挑战同样显著:多视角图像采集需在受控光照条件下保持时间分辨率与空间一致性;三维重建过程中,基于运动恢复结构(SfM)与神经辐射场(NeRF)的技术融合面临计算复杂度高与细节保留的平衡问题;此外,大规模点云数据的时序对齐、标注生成及存储管理亦对数据处理流程提出了严峻考验。
常用场景
经典使用场景
在植物表型组学领域,三维点云数据为解析植物结构动态提供了关键支撑。Pepper-4D作为首个专注于辣椒植物的4D(三维+时间)点云数据集,其经典使用场景集中于植物器官的语义与实例分割研究。通过高时间分辨率(每两日扫描)捕获植物从营养生长到开花结果的完整生命周期,该数据集使得研究人员能够精确追踪叶片、茎秆等器官的形态演变,为理解植物生长发育的时空规律提供了标准化基准。
实际应用
在智慧农业与作物育种实践中,Pepper-4D的实际应用体现在自动化表型监测与生长预测系统中。利用该数据集训练的模型可部署于温室或田间,实现对辣椒植株健康状况的实时评估、新器官萌发的自动检测以及生物量积累的动态估算。这些能力有助于优化灌溉、施肥与病虫害管理策略,加速高产、抗逆品种的选育进程,提升农业生产的智能化与资源利用效率。
衍生相关工作
围绕Pepper-4D数据集,已衍生出一系列针对植物三维点云的经典研究工作。这些工作主要集中于开发先进的深度学习架构,如基于Transformer的时空分割网络、用于器官跟踪的图神经网络,以及结合生成对抗网络(GAN)的逼真植物三维模型合成方法。这些模型不仅在数据集内部任务上取得了基准性能,其方法学创新也推动了整个植物表型分析领域向更精细、更动态的方向演进。
以上内容由遇见数据集搜集并总结生成


