灵巧手功能性抓取数据集
收藏中国科学院脑科学数据中心2023-12-04 更新2024-03-05 收录
下载链接:
https://www.braindatacenter.cn/datacenter/web/#/dataSet/details?id=1731564829640482817
下载链接
链接失效反馈官方服务:
资源简介:
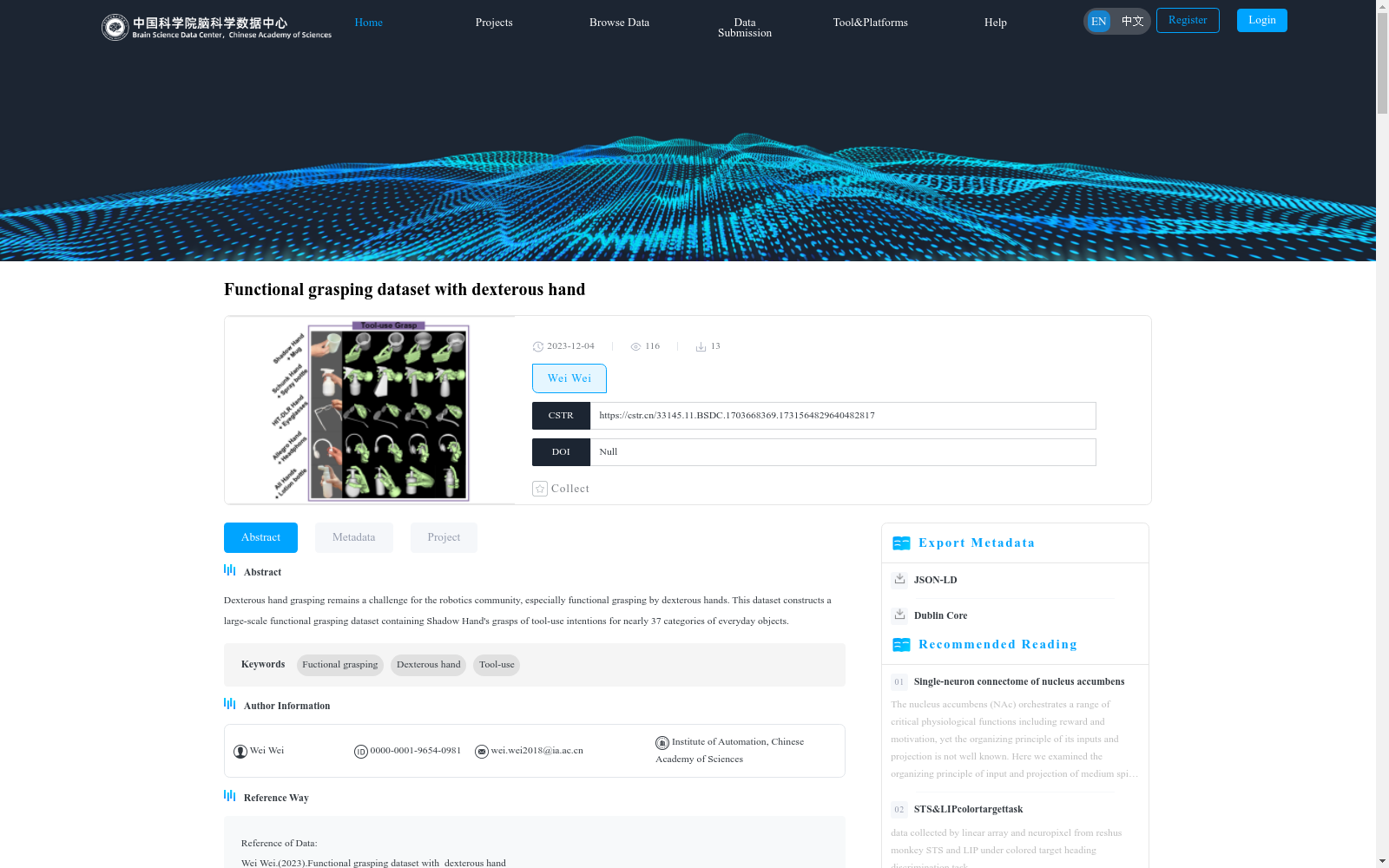
灵巧手抓取仍然是机器人界的一个难题,尤其是灵巧手的功能性抓取数据。本数据集构建了一个大规模的功能性抓取数据集,包含多种灵巧手针对近37类日常物品的工具使用意图的抓取。
Dexterous hand grasping remains a challenging problem in the robotics community, especially when it comes to functional grasp data for dexterous hands. This work constructs a large-scale functional grasp dataset, which includes grasps with tool-use intent from multiple dexterous hands targeting nearly 37 categories of daily objects.
提供机构:
中国科学院脑科学数据中心
创建时间:
2023-12-04
搜集汇总
数据集介绍
背景与挑战
背景概述
该数据集是一个大规模灵巧手功能性抓取数据集,专注于Shadow Hand对近37类日常用品进行工具使用意图的抓取,旨在解决机器人学中灵巧手抓取的挑战。数据集包含丰富的3D模型(如.obj文件)和点云数据(如.npy文件),覆盖喷雾瓶等多个对象类别,以支持功能性抓取研究。数据由中国科学院自动化研究所于2023年发布,存储容量为2.17 GB,包含127个文件,适用于机器人抓取算法开发和工具使用场景分析。
以上内容由遇见数据集搜集并总结生成


