Tactile-Language-Action dataset
收藏arXiv2025-03-11 更新2025-03-13 收录
下载链接:
https://sites.google.com/view/tactile-language-action/
下载链接
链接失效反馈官方服务:
资源简介:
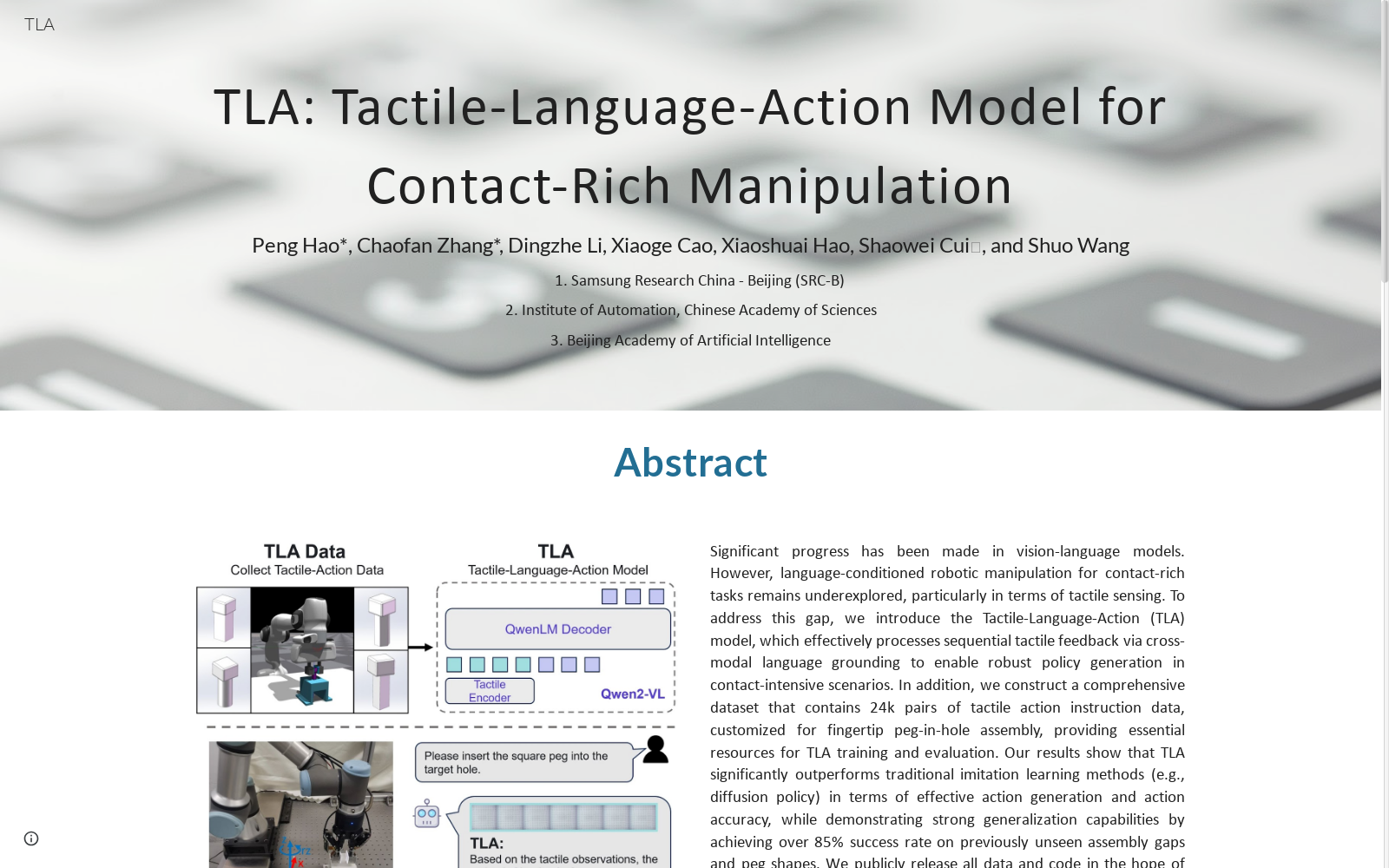
本研究构建了一个名为Tactile-Language-Action的数据集,包含24k对触觉动作指令数据,专为指尖peg-in-hole装配任务定制。数据集通过高保真触觉模拟器收集,包含触觉序列和相应的机器人动作轨迹。该数据集为语言条件下的触觉技能学习提供了必要的资源,可应用于机器人触觉感知和动作生成研究。
This study constructs a dataset named Tactile-Language-Action, which includes 24,000 pairs of tactile action instruction data customized for the fingertip peg-in-hole assembly task. Collected via a high-fidelity tactile simulator, the dataset contains tactile sequences and corresponding robot motion trajectories. This dataset provides essential resources for language-conditioned tactile skill learning, and can be applied to research on robot tactile perception and motion generation.
提供机构:
中国科学院自动化研究所
创建时间:
2025-03-11
搜集汇总
数据集介绍
构建方式
为了解决触觉感知在复杂任务中的重要性,该数据集通过模拟环境收集了24k对触觉动作指令数据,专注于指尖的插孔组装任务。数据收集过程中,机器人装备了GelStereo 2.0视触觉传感器,并在NVIDIA Isaac Gym中构建了模拟环境。通过模拟触觉传感器在交互过程中的变形,以及利用有限单元法和Flex物理引擎,该数据集提供了高保真的触觉图像。在每次尝试中,触觉图像序列和插销孔位姿误差被记录,并用于训练和评估。
特点
该数据集的主要特点是其专注于触觉感知,这对于复杂的机器人操作任务至关重要。它包含24k对触觉动作指令数据,这些数据是在指尖插孔组装任务中收集的。此外,数据集还提供了高保真的触觉图像,这些图像是通过模拟触觉传感器在交互过程中的变形获得的。这些图像对于训练和评估触觉语言动作模型非常重要。
使用方法
该数据集的使用方法包括以下步骤:首先,将收集的交互数据转换为指令格式,其中包含了触觉图像序列和对应的机器人动作轨迹。然后,使用Qwen2-VL作为触觉编码器,将触觉图像序列转换为触觉特征。最后,使用Qwen2语言模型将这些触觉特征与文本指令相结合,以预测机器人的动作。通过这种方式,该数据集可以用于训练和评估触觉语言动作模型,以实现基于触觉感知的机器人操作任务。
背景与挑战
背景概述
触觉感知在接触丰富的机器人操控任务中扮演着至关重要的角色,尤其是在精细组装任务中,机器人需要精确感知物体表面的小变化,以避免损坏或错位。为了解决这一挑战,研究人员提出了触觉-语言-动作(TLA)模型,该模型通过跨模态语言接地有效处理连续的触觉反馈,以在接触密集的场景中实现稳健的策略生成。此外,研究人员构建了一个包含24k对触觉动作指令数据的数据集,专门用于指尖插孔组装,为TLA训练和评估提供了必要的资源。结果表明,TLA在有效动作生成和动作准确性方面显著优于传统的模仿学习方法,并且在未见过的组装间隙和插销形状上实现了超过85%的成功率,显示出强大的泛化能力。
当前挑战
触觉感知在机器人操控中的挑战包括缺乏专门用于接触丰富操控任务的触觉动作指令数据集,以及缺乏合适的触觉-语言-动作模型。为了解决这些挑战,研究人员构建了一个专门用于指尖触觉插孔组装场景的触觉动作指令数据集,并提出了一个名为TLA的通用机器人策略学习方法,通过跨模态微调,该模型能够通过语言接地获取泛化的触觉技能。然而,TLA模型在处理连续触觉信息时仍存在局限性,需要进一步探索更有效的表示和编码策略。此外,触觉信号格式的选择和动作解码过程的简化也需要进一步改进。
常用场景
经典使用场景
在触觉语言行动数据集(Tactile-Language-Action dataset)的经典使用场景中,机器人通过触觉传感和语言指令来完成精细的装配任务,如指尖插入孔洞。数据集包含24,000对触觉动作指令数据,专门为指尖插入孔洞装配任务定制,为Tactile-Language-Action(TLA)模型训练和评估提供了必要的资源。TLA模型能够有效处理序列触觉反馈,通过跨模态语言接地生成鲁棒的策略,在接触密集的场景中表现出色。该模型在生成有效动作和动作准确性方面显著优于传统的模仿学习方法,如扩散策略,并且在未见过的装配间隙和销形状上实现了超过85%的成功率,展示了强大的泛化能力。
衍生相关工作
Tactile-Language-Action数据集衍生了多个相关的研究工作,如触觉-语言模型在机器人操控中的应用、视觉-语言-行动模型在机器人操控中的应用等。这些研究工作进一步拓展了触觉感知在机器人操控技能中的应用,提高了机器人在复杂环境下的适应性和灵活性。此外,该数据集还为机器人自主学习和决策提供了重要的支持,推动了机器人智能化水平的提升。
数据集最近研究
最新研究方向
触觉-语言-动作模型(TLA)为接触丰富的操纵任务提供了新的研究方向。该模型通过跨模态语言接地处理顺序触觉反馈,以实现接触密集场景中鲁棒的策略生成。此外,构建了一个包含24k对触觉动作指令数据的综合数据集,为指尖插孔组装定制,为TLA训练和评估提供必要资源。结果表明,TLA在有效动作生成和动作准确性方面显著优于传统的模仿学习方法(如扩散策略),并在未见过的组装间隙和插孔形状上表现出超过85%的成功率。该项目公开发布所有数据和代码,旨在推动语言条件触觉操纵技能学习的研究。
相关研究论文
- 1TLA: Tactile-Language-Action Model for Contact-Rich Manipulation中国科学院自动化研究所 · 2025年
以上内容由遇见数据集搜集并总结生成


