UCSD Pick Place
收藏www.yunhaifeng.com2025-03-21 收录
下载链接:
https://www.yunhaifeng.com/FOWM/
下载链接
链接失效反馈官方服务:
资源简介:
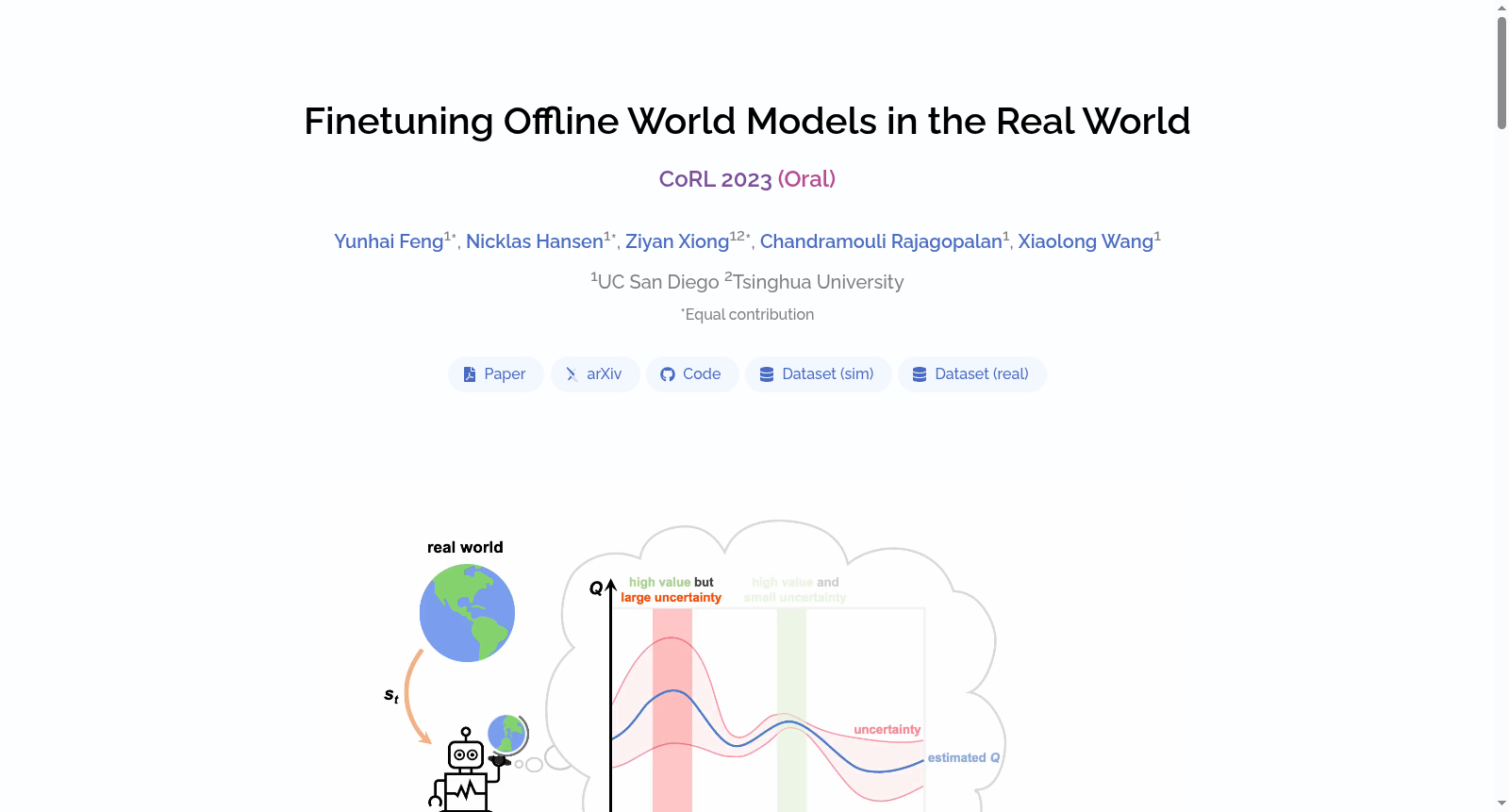
UCSD Pick Place 是由加利福尼亚大学圣地亚哥分校(University of California San Diego)创建的机器人操作数据集,专注于视觉运动控制任务中的抓取与放置操作。该数据集包含多个任务的视觉和运动数据,如 reach(到达目标位置)、pick(抓取物体)和 kitchen(厨房环境中的物体操作)等,涵盖了多样化的操作场景和任务类型。
UCSD Pick Place is a robotic manipulation dataset created by the University of California San Diego, focusing on grasping and placing operations in visuomotor control tasks. This dataset contains visual and motion data for multiple tasks, such as 'reach' (reaching target positions), 'pick' (grasping objects) and 'kitchen' (object manipulation in kitchen environments), covering diverse manipulation scenarios and task types.
提供机构:
加利福尼亚大学圣地亚哥分校
搜集汇总
数据集介绍
以上内容由遇见数据集搜集并总结生成


