dpdl-benchmark/smallnorb
收藏Hugging Face2024-04-29 更新2024-06-12 收录
下载链接:
https://hf-mirror.com/datasets/dpdl-benchmark/smallnorb
下载链接
链接失效反馈官方服务:
资源简介:
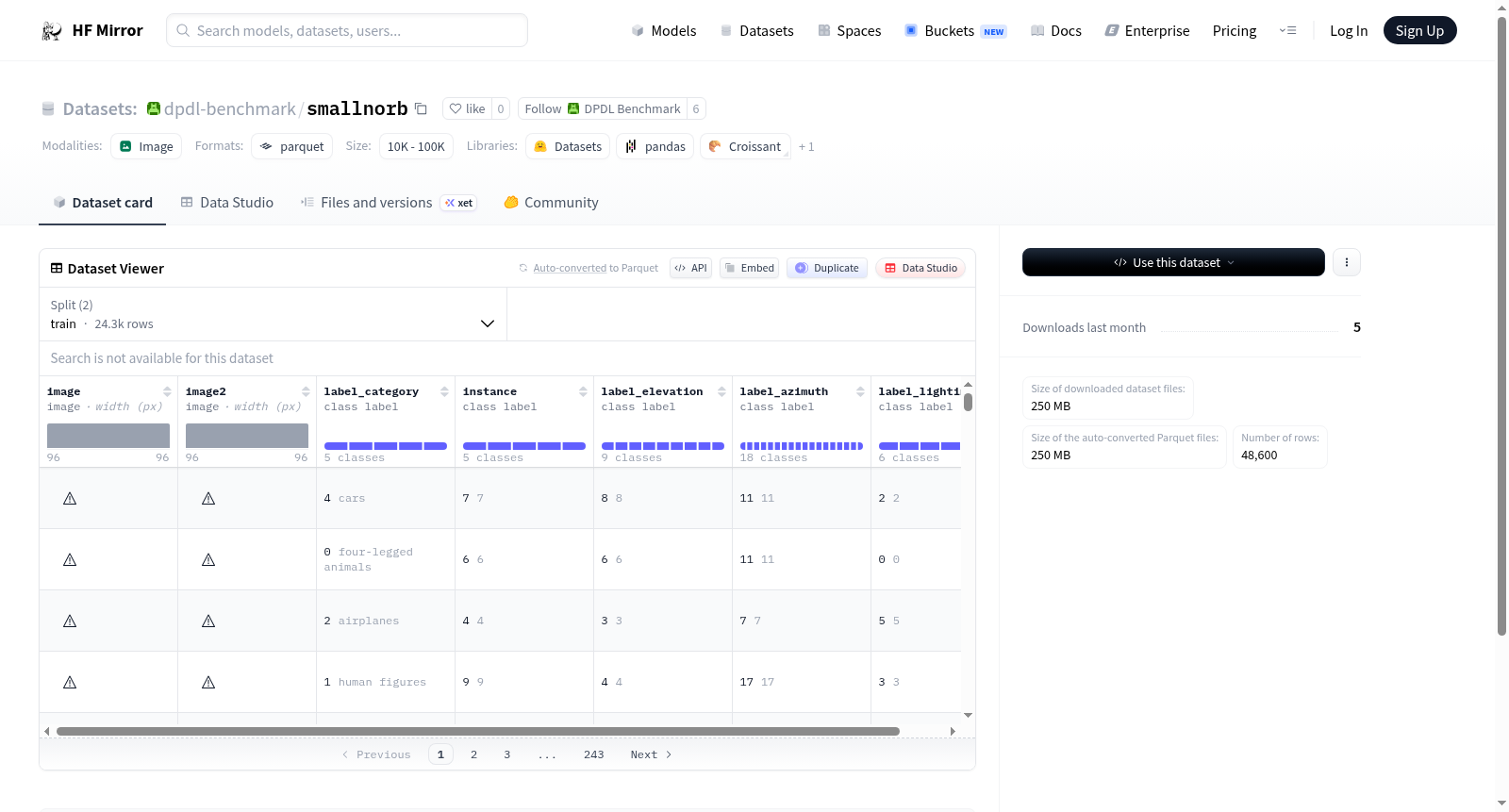
该数据集包含多个特征,如图像(image和image2)、标签类别(label_category)、实例(instance)、标签高度(label_elevation)、标签方位(label_azimuth)和标签光照(label_lighting)。标签类别包括四足动物、人物、飞机、卡车和汽车等。数据集分为训练集和测试集,分别包含24300个样本。数据集的下载大小为250459073字节,总大小为237050060字节。
该数据集包含多个特征,如图像(image和image2)、标签类别(label_category)、实例(instance)、标签高度(label_elevation)、标签方位(label_azimuth)和标签光照(label_lighting)。标签类别包括四足动物、人物、飞机、卡车和汽车等。数据集分为训练集和测试集,分别包含24300个样本。数据集的下载大小为250459073字节,总大小为237050060字节。
提供机构:
dpdl-benchmark
原始信息汇总
数据集概述
特征信息
- image: 图像数据类型
- image2: 图像数据类型
- label_category: 分类标签,包含以下类别:
- 0: 四足动物
- 1: 人物
- 2: 飞机
- 3: 卡车
- 4: 汽车
- instance: 实例标签,包含以下类别:
- 0 至 9
- label_elevation: 仰角标签,包含以下类别:
- 0 至 8
- label_azimuth: 方位角标签,包含以下类别:
- 0 至 17
- label_lighting: 光照标签,包含以下类别:
- 0 至 5
数据分割
- train: 训练集,包含24300个样本,占用118433794字节
- test: 测试集,包含24300个样本,占用118616266字节
数据集大小
- 下载大小: 250459073字节
- 数据集大小: 237050060字节
配置信息
- config_name: default
- data_files:
- train: 路径为
data/train-* - test: 路径为
data/test-*
- train: 路径为
- data_files:
搜集汇总
数据集介绍
构建方式
在计算机视觉领域,三维物体识别研究常需标准化的立体图像数据。SmallNORB数据集通过精心设计的采集流程构建,其图像源自50个玩具模型在可控环境下的立体拍摄。每个模型被置于两个固定相机前,系统性地捕捉不同方位角、仰角及光照条件下的图像对,从而形成包含图像、类别、实例编号以及视角与光照标签的结构化数据。该构建方式确保了数据在几何与光照变化上的丰富性,为模型鲁棒性评估提供了坚实基础。
使用方法
该数据集主要应用于评估机器学习模型在三维物体识别任务上的泛化能力与鲁棒性。研究者通常将数据集划分为标准的训练集与测试集,利用图像对和丰富的元数据标签进行模型训练。在具体实践中,模型学习从立体图像中提取特征,并预测物体的类别,同时可探索模型对视角、光照变化的敏感性。其标准化的评估协议便于在不同算法间进行公平比较,是推动几何不变性表征学习发展的重要基准工具。
背景与挑战
背景概述
SmallNORB数据集由纽约大学库兰特数学科学研究所于2004年创建,旨在推动三维物体识别研究。该数据集聚焦于在受控条件下从不同视角、光照和方位角捕捉的五类玩具物体图像,核心研究问题在于探索视觉系统对三维形状的泛化能力。通过提供精确标注的方位、仰角和光照条件,SmallNORB为计算机视觉领域,特别是物体识别与不变性特征学习,奠定了重要的实验基础,促进了卷积神经网络等模型在复杂视觉任务中的发展。
当前挑战
SmallNORB数据集旨在解决三维物体识别中的视角与光照不变性挑战,要求模型在多样化的观察条件下准确分类物体,这对传统图像分类方法构成了显著难度。在构建过程中,研究人员面临精确控制拍摄参数、确保数据一致性的技术挑战,同时需在有限类别和实例数量下平衡数据多样性,以模拟真实世界中的视觉变化。这些挑战推动了后续研究对数据增强与模型鲁棒性的深入探索。
常用场景
经典使用场景
在计算机视觉领域,smallnorb数据集以其精心设计的立体图像和丰富的视角标注,成为研究物体识别与三维姿态估计的经典基准。该数据集包含五类常见物体,每类物体在多种光照、仰角和方位角下呈现,为模型提供了从二维图像推断三维结构的挑战性环境。研究者通常利用其双视角图像对,探索深度信息与视角不变性在物体分类任务中的关键作用,推动了卷积神经网络在复杂视觉场景下的性能评估与优化。
解决学术问题
smallnorb数据集有效解决了视觉识别中视角变化与光照条件干扰的核心学术难题。通过提供精确的仰角、方位角和光照标注,该数据集使研究者能够系统分析三维姿态对识别精度的影响,并探究模型在多变环境下的鲁棒性。其结构化设计促进了视角不变特征学习、数据增强策略以及跨域泛化能力的研究,为理解人类视觉系统与机器感知之间的差距提供了实证基础,对推进几何深度学习与不变性表示理论具有深远意义。
实际应用
在实际应用层面,smallnorb数据集为自动驾驶、机器人导航和增强现实系统提供了关键的测试平台。其模拟的真实世界物体在多视角下的表现,有助于开发能够适应复杂光照和观察角度的视觉感知算法。例如,在自动驾驶场景中,基于该数据集训练的模型可更准确地识别不同姿态的车辆与行人,提升环境感知的可靠性。此外,其在工业检测与安防监控中的物体姿态分析方面,也展现出重要的应用潜力。
数据集最近研究
最新研究方向
在计算机视觉领域,smallnorb数据集因其多视角、多光照条件下的物体图像而备受关注,为三维物体识别与姿态估计研究提供了关键基准。近期研究聚焦于利用该数据集探索自监督学习与对比学习在跨视角特征对齐中的应用,旨在提升模型对视角变化的鲁棒性。同时,结合生成对抗网络(GAN)进行数据增强,以解决小样本学习中的泛化难题,成为热点方向。这些进展不仅推动了视觉表征学习的前沿,也为自动驾驶、机器人感知等实际场景中的物体理解奠定了理论基础。
以上内容由遇见数据集搜集并总结生成


