3D Shape Completion Dataset for Agricultural Vision Systems
收藏数据集概述
描述
在这个挑战中,参与者需要根据甜椒的部分RGB-D观测数据提供完整的3D网格模型。数据集包含带有相应实例掩码和姿态的RGB-D帧,其中甜椒仅部分可见。参与者需要预测代表完整水果的3D网格。这是农业自主系统中各种下游任务(如收获和产量估计)的基本构建块。
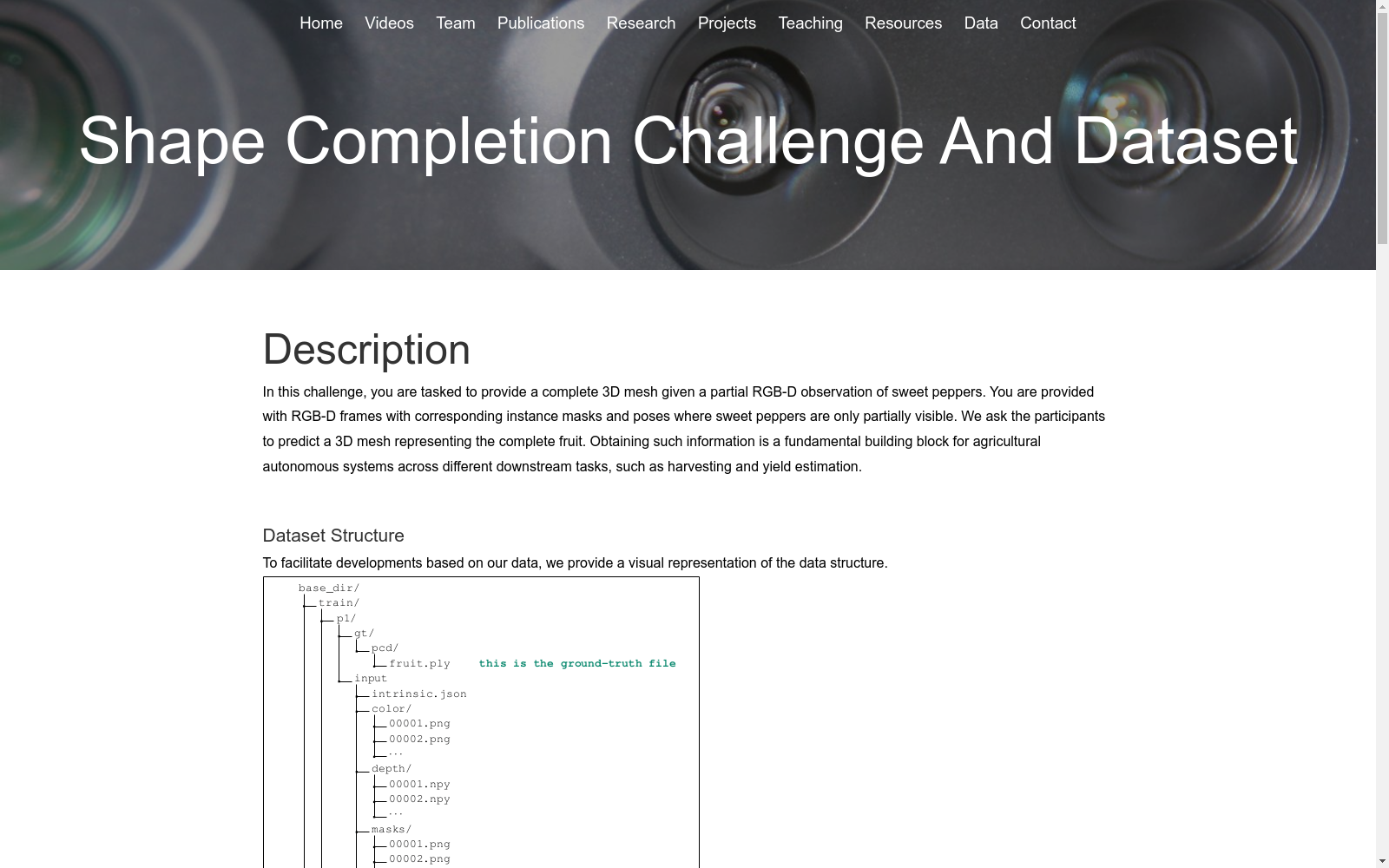
数据集结构
数据集的结构如下:
- RGB-D帧:包含部分可见的甜椒的RGB-D图像。
- 实例掩码:每个甜椒的实例掩码。
- 姿态数据:每个RGB-D帧的姿态信息。
下载
整个数据集可以在此链接下载:https://www.ipb.uni-bonn.de/html/projects/shape_completion/shape_completion_challenge.zip
提交格式
提交的数据结构应如下所示:
- 每个甜椒的ID:对应于数据集中的每个甜椒。
- 预测的3D网格文件:每个甜椒的预测3D网格文件。
资源
提供了一个小API来访问数据:https://github.com/PRBonn/shape_completion_toolkit
引用
如果使用此数据集,请引用以下论文:
@inproceedings{magistri2024icra, author = {F. Magistri and R. Marcuzzi and E.A. Marks and M. Sodano and J. Behley and C. Stachniss}, title = {{Efficient and Accurate Transformer-Based 3D Shape Completion and Reconstruction of Fruits for Agricultural Robots}}, booktitle = icra, year = 2024, videourl = {https://youtu.be/U1xxnUGrVL4}, codeurl = {https://github.com/PRBonn/TCoRe}, }
@inproceedings{pan2023iros, author = {Y. Pan and F. Magistri and T. L"abe and E. Marks and C. Smitt and C.S. McCool and J. Behley and C. Stachniss}, title = {{Panoptic Mapping with Fruit Completion and Pose Estimation for Horticultural Robots}}, booktitle = iros, year = 2023, codeurl = {https://github.com/PRBonn/HortiMapping}, videourl = {https://youtu.be/fSyHBhskjqA} }
@article{magistri2022ral-iros, author = {Federico Magistri and Elias Marks and Sumanth Nagulavancha and Ignacio Vizzo and Thomas L{"a}be and Jens Behley and Michael Halstead and Chris McCool and Cyrill Stachniss}, title = {Contrastive 3D Shape Completion and Reconstruction for Agricultural Robots using RGB-D Frames}, journal = ral, url = {https://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/magistri2022ral-iros.pdf}, year = {2022}, }