InteriorGS
收藏魔搭社区2025-12-05 更新2025-08-09 收录
下载链接:
https://modelscope.cn/datasets/spatialverse/InteriorGS
下载链接
链接失效反馈官方服务:
资源简介:
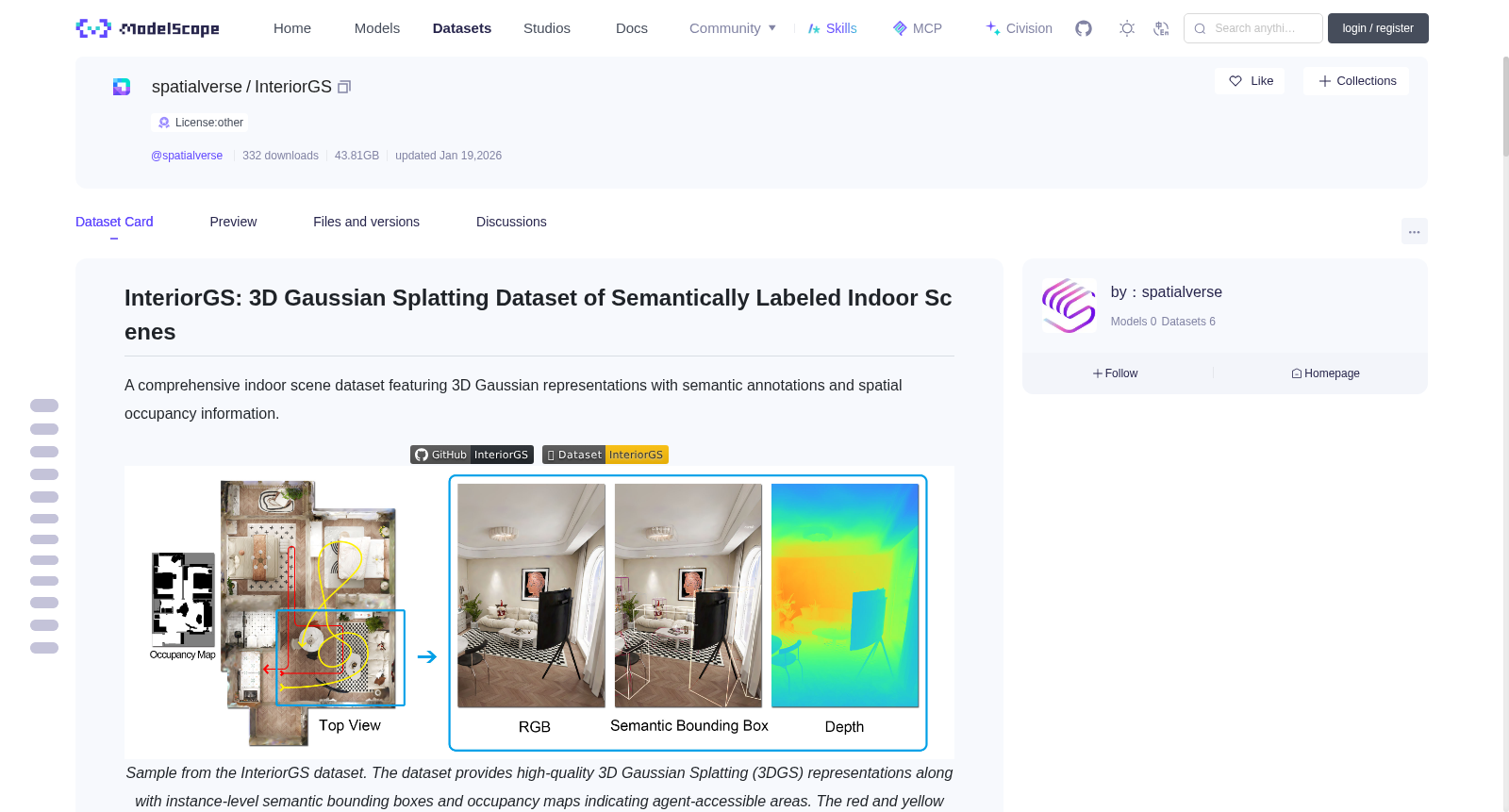
# InteriorGS: 3D Gaussian Splatting Dataset of Semantically Labeled Indoor Scenes
A comprehensive indoor scene dataset featuring 3D Gaussian representations with semantic annotations and spatial occupancy information.
<div align="center" style="margin-top: 0; padding-top: 0; line-height: 1;">
<a href="https://github.com/manycore-research/InteriorGS" target="_blank" style="margin: 2px;"><img alt="Project"
src="https://img.shields.io/badge/GitHub-InteriorGS-24292e?logo=github&logoColor=white" style="display: inline-block; vertical-align: middle;"/></a>
<a href="https://huggingface.co/datasets/spatialverse/InteriorGS" target="_blank" style="margin: 2px;"><img alt="arXiv"
src="https://img.shields.io/badge/%F0%9F%A4%97%20Dataset-InteriorGS-ffc107?color=ffc107&logoColor=white" style="display: inline-block; vertical-align: middle;"/></a>
</div>
<div align="center">
<image src="https://kloudsim-usa-cos.kujiale.com/InteriorGS/InteriorGS_overview2.jpg" alt="InteriorGS Overview" style="max-width: 100%; height: auto;"/>
<p><i>Sample from the InteriorGS dataset. The dataset provides high-quality 3D Gaussian Splatting (3DGS) representations along with instance-level semantic bounding boxes and occupancy maps indicating agent-accessible areas. The red and yellow trajectories denote the paths of a ground robot and a UAV (drone), respectively. Notably, InteriorGS supports free-form agent navigation and interaction within a continuous 3D environment, enabling realistic spatial intelligence training and evaluation.</i></p>
<video controls src="https://kloudsim-usa-cos.kujiale.com/InteriorGS/Human_view.mp4"> </video>
<p><i>🤖RGB rendering and corresponding depth map from the perspective of the human/ground robot along the red trajectory</i></p>
<video controls src="https://kloudsim-usa-cos.kujiale.com/InteriorGS/Drone_view.mp4"> </video>
<p><i>🚁RGB rendering and corresponding depth map from the UAV (drone) perspective along the yellow trajectory.</i></p>
</div>
## 🔄 News
- 2025-08-08: Upload visualize_meta.py to visualize the json file.
- 2025-08-01: Released InteriorGS v2.0, featuring 1,000 indoor scenes along with their corresponding floorplans.
- 2025-07-24: Initial release InteriorGS (v1.0) with 500 scenes.
## 📋 Overview
Existing 3D indoor scene datasets mainly fall into two categories, each with its own limitations. Datasets reconstructed from RGB-D scans are typically represented as triangle meshes, but often suffer from incomplete geometry, occlusions, and missing semantic or structural annotations. Due to the incompleteness of the reconstructed scenes, they do not support continuous agent movement, limiting their use in navigation and interaction tasks.
In contrast, artist-designed 3D scenes provide high visual quality, but are available in limited numbers and often lack consistent semantic and spatial annotations, making them less suitable for large-scale scene understanding.
To overcome these issues, we present InteriorGS, a dataset of 1,000 indoor scenes represented using 3D Gaussian Splatting (3DGS). We create it by photorealistically rendering handcrafted 3D environments, then reconstructing splatting-based representations from over 5 million images, resulting in high-quality and lightweight 3D data that supports real-time rendering. Each scene is semantically annotated at the object level, with more than 554,000 object instances across 755 categories, and each object is paired with a 3D bounding box. We also provide an occupancy map for each scene to support navigation and spatial understanding.
InteriorGS includes over 80 types of indoor environments, such as homes, convenience stores, wedding banquet halls, and museums. It supports various downstream tasks, including 3D scene understanding, controllable scene generation, and embodied agent navigation, and offers a valuable resource for research in spatial intelligence.
We provide a [sample viewer](https://www.kujiale.com/pub/koolab/koorender/InteriorGS) for viewing our data.
## 🗂️ Dataset Structure
```bash
InteriorGS
├── 0001_839920 # 3D Gaussian scene with detailed information
│ ├── 3dgs_compressed.ply # Gaussian point cloud files
│ ├── labels.json # Semantic annotations and bounding boxes
│ ├── occupancy.png # Grayscale occupancy map
│ └── occupancy.json # Occupancy metadata
| └── structure.json # Floorplan data
├── 0002_839955
│ ├── 3dgs_compressed.ply
│ ├── labels.json
│ ├── occupancy.png
│ └── occupancy.json
| └── structure.json
└── ...
```
## 📊 Data Description
### 3D Gaussian Models (.ply files)
- **Format**: PLY (Polygon File Format)
- **Content**: 3D Gaussian parameters including position, covariance, opacity, and spherical harmonics coefficients. The data is **compressed** using the **SuperSplat** method to optimize storage and loading efficiency.
- **Coordinate System**: The coordinate system of the scenes is defined as **XYZ = (Right, Back, Up)**
- **Units**: Meters
### Semantic Annotations
- **Bounding Boxes**: 3D oriented bounding boxes defined by 8 corner vertices
- **Labels**: Per-object semantic class labels with instance IDs
- **Format**: JSON files containing arrays of annotated objects
### Occupancy Maps
- **Resolution**: 1024x1024 pixels (configurable)
- **Format**: PNG (grayscale) + JSON (metadata). Metadata is used for mapping between the 2D pixels and 3DGS world coordinates.
- **Coverage**: Top-down view of navigable floor space
- **Values**:
- `255` (white): Free space
- `0` (black): Occupied space
- `127` (gray): Unknown space
### Floorplan data (structure.json)
This document provides an explanation of the keys used in the scene layout data. Coordinate system is right-handed, z
up, and unit in meter.
- **rooms**: array of rooms within the scene layout. Virtual partition of the scene that does not refer to actual geometry.
- **profile**: 2D polygon in xy plane that defines room outline or contour.
- **room_type**: functional type, such as "Living and Dining Room", "Master Bedroom", etc.
- **walls**: array of wall meshes.
- **location**: line segment in xy plane.
- **thickness**: total distance extended from line segment in direction in xy plane and orthogonal to line segment .
- **height**: height in z axis from ground(z=0).
- **holes**: openings on the walls, for placing other objects such as window and door.
- **profile**: 3D polygon that defines the hole shape on the wall.
- **thickness**: total distance extended from profile in direction of profile plane normal.
- **type**: WINDOW or DOOR.
- **ins**: instances within scene.
- **label**: semantic label, such as "Window", "Curtain", "Chair", etc.
- **position**: instance bounding box center in world frame.
- **size**: instance bounding box size in world frame.
## 🏠 Citation
If you use **InteriorGS** in your research or development, please cite or link to our project page:
```bibtex
@misc{InteriorGS2025,
title = {InteriorGS: A 3D Gaussian Splatting Dataset of Semantically Labeled Indoor Scenes},
author = {SpatialVerse Research Team, Manycore Tech Inc.},
year = {2025},
howpublished = {\url{https://huggingface.co/datasets/spatialverse/InteriorGS}}
}
```
## 📄 License
This dataset is released under [InteriorGS License](https://kloudsim-usa-cos.kujiale.com/InteriorGS/InteriorGS_Terms_of_Use.pdf).
## 🙏 Acknowledgements
This project makes partial use of code from the [SuperSplat](https://github.com/playcanvas/supersplat) repository. We thank the authors for open-sourcing their implementation.
# InteriorGS: 语义标注室内场景的3D高斯溅射数据集
本数据集为一款综合性室内场景数据集,搭载带语义标注与空间占用信息的3D高斯表示形式。
<div align="center" style="margin-top: 0; padding-top: 0; line-height: 1;">
<a href="https://github.com/manycore-research/InteriorGS" target="_blank" style="margin: 2px;"><img alt="项目"
src="https://img.shields.io/badge/GitHub-InteriorGS-24292e?logo=github&logoColor=white" style="display: inline-block; vertical-align: middle;"/></a>
<a href="https://huggingface.co/datasets/spatialverse/InteriorGS" target="_blank" style="margin: 2px;"><img alt="数据集"
src="https://img.shields.io/badge/%F0%9F%A4%97%20Dataset-InteriorGS-ffc107?color=ffc107&logoColor=white" style="display: inline-block; vertical-align: middle;"/></a>
</div>
<div align="center">
<image src="https://kloudsim-usa-cos.kujiale.com/InteriorGS/InteriorGS_overview2.jpg" alt="InteriorGS数据集概览" style="max-width: 100%; height: auto;"/>
<p><i>InteriorGS数据集示例。本数据集提供高质量的3D高斯溅射(3D Gaussian Splatting,简称3DGS)表示形式,同时附带实例级语义包围盒与表征智能体可通行区域的占用地图。红色与黄色轨迹分别代表地面机器人与无人机(UAV)的航行路径。值得注意的是,InteriorGS支持智能体在连续三维环境中进行自由形式的导航与交互,可为逼真的空间智能训练与评估提供支撑。</i></p>
<video controls src="https://kloudsim-usa-cos.kujiale.com/InteriorGS/Human_view.mp4"> </video>
<p><i>🤖沿红色轨迹的人类/地面机器人视角下的RGB渲染结果与对应深度图</i></p>
<video controls src="https://kloudsim-usa-cos.kujiale.com/InteriorGS/Drone_view.mp4"> </video>
<p><i>🚁沿黄色轨迹的无人机(UAV)视角下的RGB渲染结果与对应深度图。</i></p>
</div>
## 🔄 更新
- 2025-08-08:上传visualize_meta.py工具,用于可视化JSON元文件。
- 2025-08-01:发布InteriorGS v2.0版本,包含1000个室内场景及其配套平面图。
- 2025-07-24:首次发布InteriorGS v1.0版本,包含500个室内场景。
## 📋 数据集概览
当前主流的三维室内场景数据集主要分为两类,且各有局限。基于RGB-D扫描重建的数据集通常以三角网格作为表示形式,但往往存在几何残缺、遮挡问题,且缺失语义或结构标注。由于重建场景存在完整性缺陷,这类数据集无法支持智能体的连续移动,限制了其在导航与交互任务中的应用。
与之相对,艺术家手工制作的三维场景视觉质量优异,但数量有限,且通常缺乏统一的语义与空间标注,难以适用于大规模场景理解任务。
为解决上述问题,我们推出InteriorGS数据集:该数据集包含1000个采用3D高斯溅射(3D Gaussian Splatting,简称3DGS)表示的室内场景。我们通过对手工搭建的三维环境进行照片级真实感渲染,再从超500万张图像中重建基于溅射的表示形式,最终得到支持实时渲染的高质量轻量化三维数据。每个场景均完成了对象级语义标注,涵盖755个类别、超55.4万个对象实例,且每个对象均配有三维包围盒。此外,我们还为每个场景提供占用地图,以支持导航与空间理解任务。
InteriorGS涵盖超80类室内场景,包括住宅、便利店、婚礼宴会厅与博物馆等。其支持多种下游任务,如三维场景理解、可控场景生成与具身智能体导航,可为空间智能领域的研究提供宝贵的资源。
我们提供了[数据示例查看器](https://www.kujiale.com/pub/koolab/koorender/InteriorGS),用于浏览数据集内容。
## 🗂️ 数据集结构
bash
InteriorGS
├── 0001_839920 # 包含详细信息的3D高斯场景
│ ├── 3dgs_compressed.ply # 高斯点云文件
│ ├── labels.json # 语义标注与包围盒信息
│ ├── occupancy.png # 灰度占用地图
│ └── occupancy.json # 占用地图元数据
| └── structure.json # 平面图数据
├── 0002_839955
│ ├── 3dgs_compressed.ply
│ ├── labels.json
│ ├── occupancy.png
│ └── occupancy.json
| └── structure.json
└── ...
## 📊 数据说明
### 3D高斯模型(.ply文件)
- **格式**:PLY(多边形文件格式,Polygon File Format)
- **内容**:包含位置、协方差、不透明度与球谐系数的3D高斯参数。本数据集采用**SuperSplat**方法对数据进行压缩,以优化存储与加载效率。
- **坐标系**:场景坐标系定义为**XYZ = (右,后,上)**
- **单位**:米
### 语义标注
- **包围盒**:由8个顶点定义的三维定向包围盒
- **标注**:带有实例ID的逐对象语义类别标签
- **格式**:包含标注对象数组的JSON文件
### 占用地图
- **分辨率**:1024×1024像素(可配置)
- **格式**:PNG(灰度图)+ JSON(元数据)。元数据用于实现二维像素与3DGS世界坐标系之间的映射。
- **覆盖范围**:可通行地面区域的俯视视角
- **像素值**:
- `255`(白色):可通行区域
- `0`(黑色):不可通行区域
- `127`(灰色):未知区域
### 平面图数据(structure.json)
本部分对场景布局数据中的字段键值进行说明。坐标系采用右手坐标系,z轴向上,单位为米。
- **rooms**:场景布局内的房间数组。属于场景的虚拟分区,不对应实际几何结构。
- **profile**:xy平面内的二维多边形,用于定义房间的轮廓。
- **room_type**:房间功能类型,例如“客餐厅”“主卧”等。
- **walls**:墙面网格数组。
- **location**:xy平面内的线段。
- **thickness**:线段沿xy平面内垂直于自身方向的总延伸距离。
- **height**:距地面(z=0)的z轴高度。
- **holes**:墙面上的开口,用于安装门窗等物体。
- **profile**:三维多边形,用于定义墙面上开口的形状。
- **thickness**:轮廓沿其所在平面法线方向的总延伸距离。
- **type**:开口类型,可选WINDOW(窗户)或DOOR(门)。
- **ins**:场景内的对象实例。
- **label**:语义标签,例如“窗户”“窗帘”“椅子”等。
- **position**:实例包围盒中心的世界坐标系坐标。
- **size**:实例包围盒在世界坐标系中的尺寸。
## 🏠 引用
若您在研究或开发中使用**InteriorGS**数据集,请引用或链接至我们的项目页面:
bibtex
@misc{InteriorGS2025,
title = {InteriorGS: A 3D Gaussian Splatting Dataset of Semantically Labeled Indoor Scenes},
author = {SpatialVerse Research Team, Manycore Tech Inc.},
year = {2025},
howpublished = {url{https://huggingface.co/datasets/spatialverse/InteriorGS}}
}
## 📄 许可协议
本数据集采用[InteriorGS许可协议](https://kloudsim-usa-cos.kujiale.com/InteriorGS/InteriorGS_Terms_of_Use.pdf)进行发布。
## 🙏 致谢
本项目部分使用了[SuperSplat](https://github.com/playcanvas/supersplat)仓库中的代码。我们感谢其作者开源相关实现。
提供机构:
maas
创建时间:
2025-08-01
搜集汇总
数据集介绍
背景与挑战
背景概述
InteriorGS是一个包含1000个室内场景的3D高斯泼溅数据集,提供高质量的3D表示和实时渲染能力。每个场景都包含实例级语义标注(覆盖755个类别和超过55.4万个对象)以及占用地图,支持3D场景理解、可控生成和具身代理导航等任务。
以上内容由遇见数据集搜集并总结生成


