Zurich Urban Micro Aerial Vehicle Dataset
收藏rpg.ifi.uzh.ch2024-11-02 收录
下载链接:
http://rpg.ifi.uzh.ch/zurichmavdataset.html
下载链接
链接失效反馈官方服务:
资源简介:
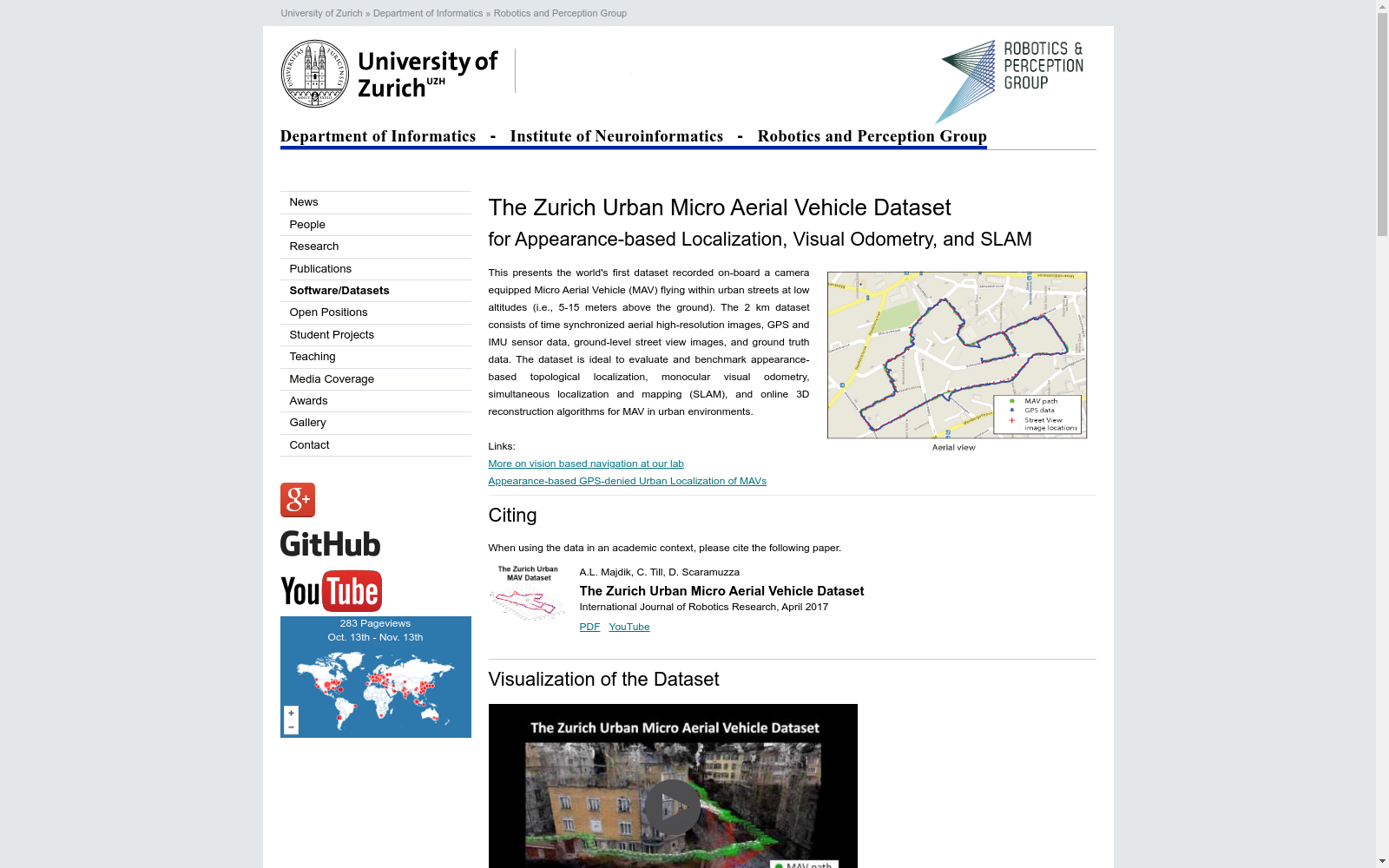
该数据集包含在苏黎世城市环境中使用微型飞行器(MAV)收集的图像和传感器数据。数据包括RGB图像、深度图像、IMU数据、GPS数据和激光扫描数据,用于研究城市环境中的自主飞行和导航。
This dataset contains image and sensor data collected by micro air vehicles (MAVs) in the urban environment of Zurich. The data includes RGB images, depth images, IMU data, GPS data, and LiDAR scan data, which is intended for research on autonomous flight and navigation in urban environments.
提供机构:
rpg.ifi.uzh.ch
搜集汇总
数据集介绍
构建方式
在构建Zurich Urban Micro Aerial Vehicle Dataset时,研究团队采用了先进的无人机技术,对瑞士苏黎世的城市环境进行了详尽的空中数据采集。通过高分辨率相机和多传感器集成系统,该数据集记录了城市建筑、道路、植被等多种地物的三维空间信息和纹理细节。数据采集过程严格遵循地理信息系统(GIS)的标准,确保了数据的精确性和一致性。
特点
Zurich Urban Micro Aerial Vehicle Dataset以其高精度和多模态数据融合为显著特点。该数据集不仅包含了丰富的视觉信息,还结合了激光雷达(LiDAR)和惯性测量单元(IMU)的数据,提供了全面的环境感知能力。此外,数据集中的图像和点云数据均经过精细校准,确保了不同传感器数据之间的无缝集成,为城市规划和环境监测提供了强有力的支持。
使用方法
Zurich Urban Micro Aerial Vehicle Dataset适用于多种城市研究和应用场景。研究人员可以利用该数据集进行城市三维建模、环境变化监测以及自动驾驶系统的训练与测试。使用时,用户需先进行数据预处理,包括图像配准和点云滤波,以确保数据质量。随后,可根据具体研究需求,选择合适的算法和工具进行数据分析和模型构建。该数据集的开源性质也便于学术界和工业界的广泛应用。
背景与挑战
背景概述
Zurich Urban Micro Aerial Vehicle Dataset(苏黎世城市微型飞行器数据集)是由苏黎世联邦理工学院(ETH Zurich)的研究团队于2012年创建的,旨在为城市环境中的微型飞行器(MAV)提供高精度的视觉和惯性数据。该数据集的核心研究问题是如何在复杂的城市环境中实现精确的自主导航和避障。通过收集来自苏黎世市区的多视角图像和惯性测量单元(IMU)数据,该数据集为研究人员提供了一个真实且具有挑战性的测试平台,极大地推动了微型飞行器在城市环境中的应用研究。
当前挑战
该数据集在构建过程中面临了多重挑战。首先,城市环境的复杂性导致数据采集过程中存在大量的遮挡和动态变化,这增加了数据标注和处理的难度。其次,微型飞行器在飞行过程中受到风速、建筑物阴影等因素的影响,导致数据的不稳定性。此外,如何在保证数据质量的同时,实现高效的实时数据处理和分析,也是该数据集面临的重要挑战。这些挑战不仅影响了数据集的构建,也对后续的研究和应用提出了更高的要求。
发展历史
创建时间与更新
Zurich Urban Micro Aerial Vehicle Dataset于2012年首次发布,旨在为城市环境中的微型飞行器提供高精度的视觉和惯性数据。该数据集自发布以来,经历了多次更新,最近一次更新是在2018年,以适应不断发展的无人机技术和研究需求。
重要里程碑
该数据集的重要里程碑之一是其在2014年的扩展,引入了更多复杂的城市环境数据,包括动态障碍物和多变的光照条件,极大地推动了无人机导航和避障算法的研究。此外,2016年,该数据集与国际无人机竞赛结合,成为评估无人机性能的标准数据集之一,进一步提升了其在学术界和工业界的知名度。
当前发展情况
当前,Zurich Urban Micro Aerial Vehicle Dataset已成为无人机领域的重要基准数据集,广泛应用于路径规划、视觉导航和实时避障等研究方向。其高精度的数据和多样化的场景设置,为研究人员提供了宝贵的实验平台,推动了无人机技术的快速发展。同时,该数据集的持续更新和扩展,确保了其与最新技术趋势的同步,为未来的无人机研究奠定了坚实的基础。
发展历程
- Zurich Urban Micro Aerial Vehicle Dataset首次发表,为城市环境中的微型飞行器提供了详细的视觉和惯性测量数据。
- 该数据集首次应用于机器人导航和视觉SLAM(同步定位与地图构建)研究,显著提升了算法在复杂城市环境中的表现。
- 数据集扩展了新的传感器数据,包括高分辨率图像和深度信息,进一步丰富了研究内容。
- Zurich Urban Micro Aerial Vehicle Dataset被广泛应用于国际机器人和计算机视觉会议,成为该领域的重要基准数据集之一。
- 数据集更新了最新的城市环境数据,包括动态障碍物和复杂光照条件,以适应不断发展的研究需求。
常用场景
经典使用场景
在城市环境研究中,Zurich Urban Micro Aerial Vehicle Dataset 被广泛用于微型飞行器(MAV)的导航与避障算法开发。该数据集通过记录飞行器在苏黎世城市区域内的飞行轨迹、传感器数据和环境图像,为研究人员提供了丰富的多模态数据。这些数据有助于模拟和优化飞行器在复杂城市环境中的自主飞行能力,特别是在高楼林立、信号干扰严重的区域。
实际应用
在实际应用中,Zurich Urban Micro Aerial Vehicle Dataset 为城市监控、紧急救援和物流配送等领域提供了技术支持。例如,通过分析数据集中的飞行路径和环境信息,可以优化飞行器的路径规划,提高其在城市复杂环境中的运行效率和安全性。此外,该数据集还支持开发智能城市管理系统,通过实时监控和数据分析,提升城市管理的智能化水平。
衍生相关工作
基于 Zurich Urban Micro Aerial Vehicle Dataset,许多相关研究工作得以展开。例如,有研究利用该数据集开发了基于深度学习的避障系统,显著提高了飞行器在复杂环境中的自主飞行能力。此外,还有研究通过分析数据集中的环境图像,提出了新的环境感知算法,进一步提升了飞行器的环境适应性。这些衍生工作不仅丰富了微型飞行器的技术体系,也为其他领域的研究提供了借鉴。
以上内容由遇见数据集搜集并总结生成


