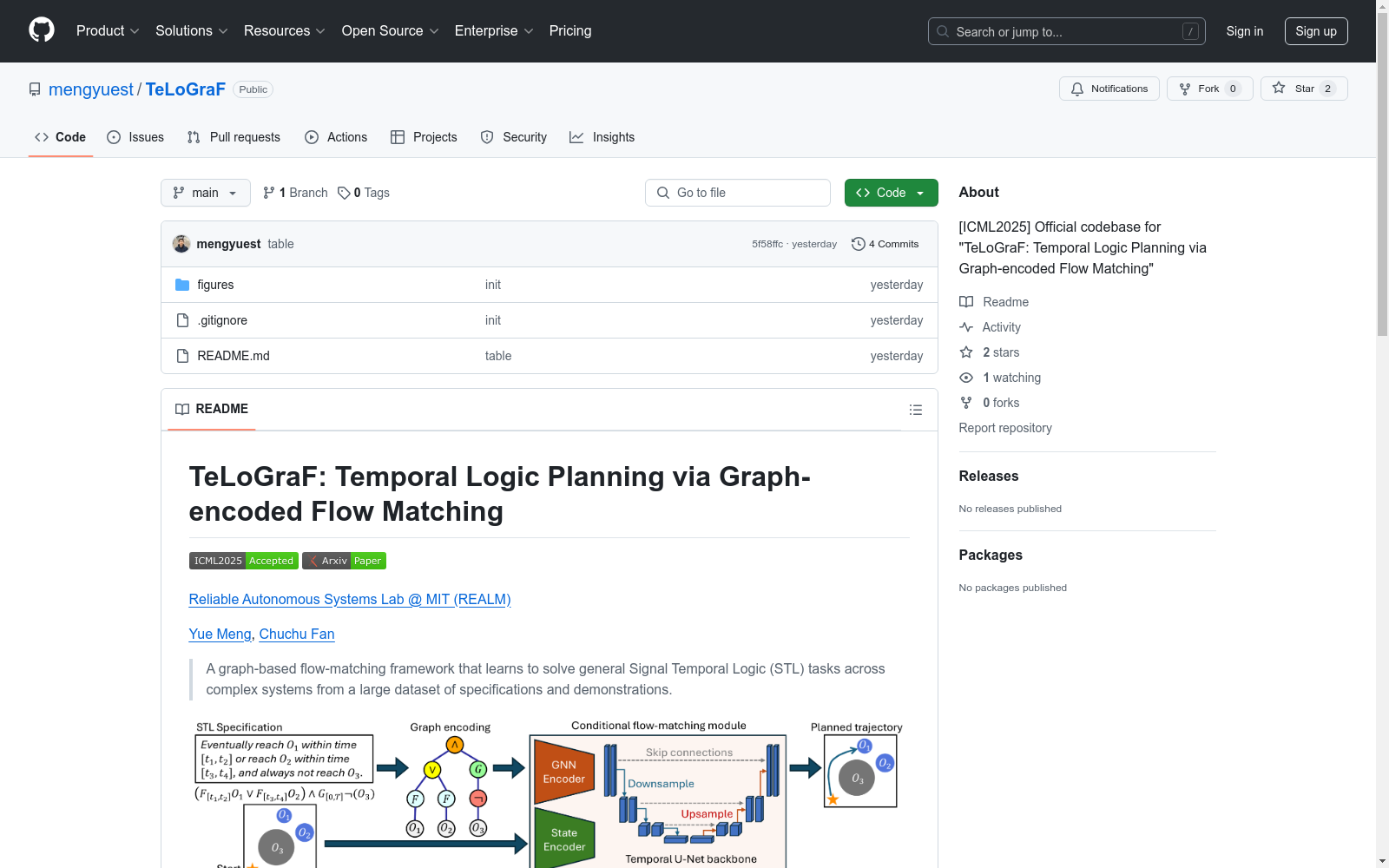
TeLoGraF
收藏arXiv2025-05-01 更新2025-05-03 收录
下载链接:
https://github.com/mengyuest/TeLoGraF
下载链接
链接失效反馈官方服务:
资源简介:
TeLoGraF数据集包含了超过20万个多样化的STL规范,这些规范配对有演示,用于五个模拟环境,包括简单的二维空间动力学模型到高维度的7DoF Franka Panda机器人臂和Ant四足导航。该数据集旨在解决复杂任务的时间依赖和逻辑约束,为机器人导航、自动驾驶和工业装配线等现实应用提供精确推理和规划的能力。
TeLoGraF Dataset contains over 200,000 diverse STL specifications, each paired with accompanying demonstrations. It covers five simulation environments, ranging from simple 2D spatial dynamic models to high-dimensional 7-DoF Franka Panda robotic arms and Ant quadruped navigation scenarios. This dataset aims to address temporal dependencies and logical constraints of complex tasks, providing precise reasoning and planning capabilities for real-world applications including robotic navigation, autonomous driving, and industrial assembly lines.
提供机构:
麻省理工学院航空航天系
创建时间:
2025-05-01
原始信息汇总
TeLoGraF 数据集概述
数据集基本信息
- 名称: TeLoGraF (Temporal Logic Planning via Graph-encoded Flow Matching)
- 研究领域: 信号时序逻辑 (Signal Temporal Logic, STL) 任务规划
- 开发团队: Reliable Autonomous Systems Lab @ MIT (REALM)
- 主要贡献者: Yue Meng, Chuchu Fan
数据集特点
- 方法框架: 基于图的流匹配框架,用于学习解决复杂系统中的通用 STL 任务
- 数据处理能力: 能够处理通用 STL 规范
- 应用范围: 适用于多种任务环境,包括线性、非线性、PointMaze、AntMaze 和 Panda 等
数据集内容
- 数据组成: 包含大量规范与演示的数据集
- 目标: 通过学习这些数据,实现跨复杂系统的 STL 任务求解
性能表现
- 优势: 在 STL 成功率和运行效率方面表现出色
获取信息
- 当前状态: 代码和数据集即将发布
相关文献
- 引用文献: bibtex @inproceedings{meng2025audere, title={AuDeRe: Automated Strategy Decision and Realization in Robot Planning and Control via LLMs}, author={Meng, Yue and Chen, Fei and Chen, Yongchao and Fan, Chuchu}, journal={arXiv preprint}, year={2025}, }
搜集汇总
数据集介绍
构建方式
TeLoGraF数据集的构建采用了系统化的方法,首先识别了四种常用的信号时序逻辑(STL)模板,包括单目标、多目标、顺序和部分顺序模板。通过程序化方法生成了20万个多样化的STL规范,每个规范都配备了相应的演示轨迹。这些轨迹通过现成的求解器在五个不同的仿真环境中生成,涵盖了从简单的二维动力学模型到高维度的7自由度Franka Panda机械臂和Ant四足机器人导航任务。
使用方法
TeLoGraF数据集的使用方法包括利用图神经网络(GNN)编码器提取STL规范的时间逻辑信息,并通过流匹配模型生成满足STL规范的轨迹。用户可以通过加载数据集中的STL规范和演示轨迹,训练和评估自己的时序逻辑规划模型。此外,数据集还支持对不同编码器架构和规划算法的系统比较,以促进时序逻辑规划领域的进一步研究。
背景与挑战
背景概述
TeLoGraF(Temporal Logic Graph-encoded Flow)是由麻省理工学院航空与航天工程系的Yue Meng和Chuchu Fan于2025年提出的一个专注于信号时序逻辑(STL)规划的数据集。该数据集旨在解决机器人学和网络物理系统中复杂任务规划的问题,特别是在处理具有时间依赖性和逻辑约束的任务时。TeLoGraF通过结合图神经网络(GNN)编码器和流匹配技术,能够学习并生成满足一般STL规范的解决方案。数据集包含20万个多样化的STL规范及其配对的演示轨迹,涵盖了从简单的二维动力学模型到高维度的7自由度Franka Panda机器人臂和Ant四足机器人导航任务。TeLoGraF的提出填补了STL规划领域缺乏大规模多样化数据集的空白,显著提升了STL规划模型的泛化能力和效率。
当前挑战
TeLoGraF数据集在构建和应用过程中面临多重挑战。首先,在领域问题层面,STL规划因其非马尔可夫特性和缺乏高效分解方法而极具挑战性,传统方法如基于采样的方法、优化方法和梯度方法难以在高维系统或复杂STL规范中平衡解决方案的质量和计算效率。其次,在数据集构建过程中,如何有效编码多样化的STL规范以支持下游任务是一大难题。此外,现有方法通常针对固定或参数化的STL规范,难以处理新的STL规范而无需重新训练模型。TeLoGraF通过引入图编码和流匹配技术,成功解决了这些挑战,但其性能在复杂STL语法或分布外STL规范下仍有提升空间。
常用场景
经典使用场景
TeLoGraF数据集在机器人路径规划与控制系统领域具有广泛的应用价值,特别是在处理复杂时空逻辑任务时表现出色。该数据集通过整合信号时序逻辑(STL)规范和对应的轨迹演示,为研究人员提供了一个标准化平台,用于开发和评估基于图神经网络(GNN)和流匹配技术的规划算法。在典型的应用场景中,研究人员可以利用该数据集训练模型,使其能够理解并满足多样化的STL约束,例如在特定时间内到达目标区域、避免障碍物或遵循特定的动作序列。
解决学术问题
TeLoGraF数据集解决了机器人规划领域中的几个关键学术问题。首先,它填补了缺乏多样化STL规范数据集的空白,使得研究人员能够探索更广泛的STL结构和约束条件。其次,通过提供高效的图编码方法,该数据集解决了传统方法在处理复杂STL时计算效率低下的问题。此外,数据集还支持研究如何将STL信息有效地嵌入到下游神经网络中,从而推动了基于学习的规划算法的发展。这些贡献显著提升了机器人在复杂任务中的规划能力和适应性。
实际应用
在实际应用中,TeLoGraF数据集为自动驾驶、工业机器人和无人机导航等领域提供了强大的技术支持。例如,在自动驾驶场景中,车辆需要在特定时间内完成变道或停车,同时避免与其他车辆碰撞;在工业机器人中,机械臂可能需要按照严格的顺序抓取物体。TeLoGraF数据集通过其丰富的STL规范和轨迹演示,使得这些复杂任务能够被高效地建模和解决,从而提升了系统的安全性和可靠性。
数据集最近研究
最新研究方向
近年来,TeLoGraF数据集在机器人学和信号时序逻辑(STL)规划领域引起了广泛关注。该数据集通过结合图神经网络(GNN)编码器和流匹配技术,为复杂的STL规范提供了高效的解决方案。研究重点集中在如何利用GNN提取时序逻辑信息,并通过流匹配生成满足STL规范的轨迹。这一方法在多个仿真环境中表现出色,包括二维空间中的简单动力学模型和高维的7自由度Franka Panda机械臂。前沿研究方向包括提升模型对复杂STL规范的泛化能力,以及探索在真实世界机器人任务中的应用潜力。TeLoGraF的开源数据集和代码为STL规划领域的研究提供了重要支持,推动了学习型方法在时序逻辑任务中的发展。
相关研究论文
- 1TeLoGraF: Temporal Logic Planning via Graph-encoded Flow Matching麻省理工学院航空航天系 · 2025年
以上内容由遇见数据集搜集并总结生成


