Oakland 3-D Point Cloud Dataset
收藏www.cs.cmu.edu2024-10-31 收录
下载链接:
http://www.cs.cmu.edu/~vmr/datasets/oakland_3d/cvpr09/doc/
下载链接
链接失效反馈官方服务:
资源简介:
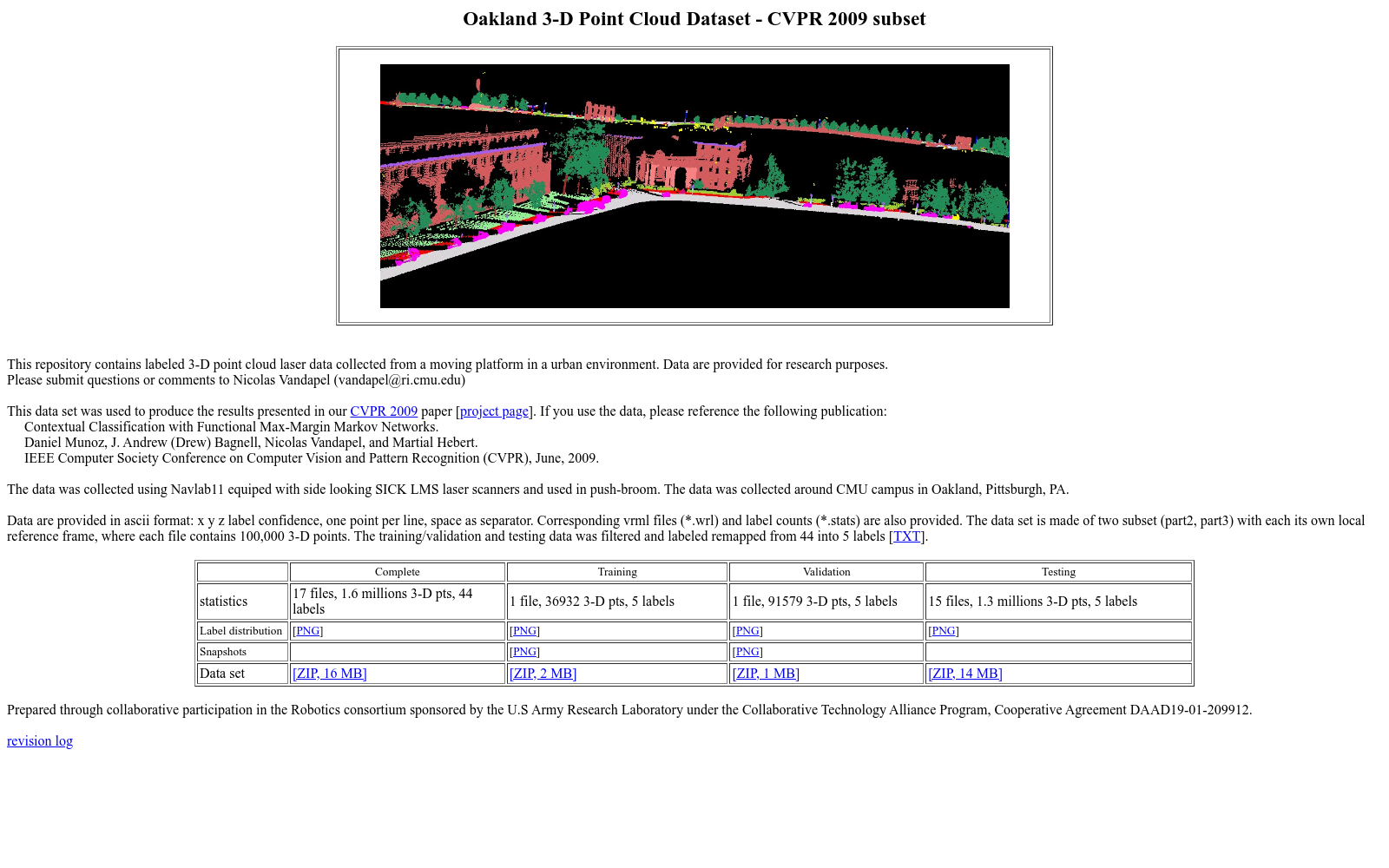
该数据集包含来自匹兹堡市奥克兰区的三维点云数据,主要用于城市环境中的三维建模和分析。数据包括激光扫描仪获取的点云数据,以及相关的地面真值标签,用于物体识别和分类任务。
This dataset contains 3D point cloud data sourced from the Oakland District of Pittsburgh City, which is primarily utilized for 3D modeling and analysis in urban environments. The dataset includes point cloud data collected via laser scanners, along with corresponding ground truth labels intended for object recognition and classification tasks.
提供机构:
www.cs.cmu.edu
搜集汇总
数据集介绍
构建方式
Oakland 3-D Point Cloud Dataset的构建基于高精度的激光扫描技术,通过对奥克兰市区的多个关键区域进行密集扫描,获取了大量三维点云数据。这些数据经过精细的预处理,包括噪声过滤、点云配准和坐标校正,确保了数据的准确性和一致性。随后,数据被分割成多个子集,每个子集代表一个特定的城市区域,便于后续的分析和应用。
特点
该数据集的显著特点在于其高分辨率和多维度的数据结构。每个点云数据不仅包含空间坐标信息,还附带了反射强度和颜色信息,这为复杂的城市环境分析提供了丰富的数据支持。此外,数据集的多样性体现在涵盖了从建筑物到道路、植被等多种城市元素,使得其在城市规划、环境监测和自动驾驶等领域具有广泛的应用潜力。
使用方法
Oakland 3-D Point Cloud Dataset的使用方法多样,适用于多种研究和应用场景。研究者可以通过点云处理软件,如CloudCompare或Meshlab,加载和可视化数据集,进行空间分析和模型构建。在城市规划中,该数据集可用于建筑物高度测量和城市形态分析;在环境监测中,可用于植被覆盖率和空气质量评估;在自动驾驶领域,可用于道路和障碍物的识别与导航。
背景与挑战
背景概述
Oakland 3-D Point Cloud Dataset,由美国卡内基梅隆大学机器人研究所于2009年创建,是城市环境三维点云数据集的先驱之一。该数据集的核心研究问题在于如何从大规模的三维点云数据中提取有用的结构信息,以支持城市规划、自动驾驶和机器人导航等应用。主要研究人员包括Sebastian Scherer等,他们的工作极大地推动了三维点云处理技术的发展,并为后续研究提供了宝贵的数据资源。
当前挑战
Oakland 3-D Point Cloud Dataset在构建过程中面临了多重挑战。首先,数据采集需要在复杂的城市环境中进行,确保点云数据的完整性和准确性。其次,数据处理技术需要高效且精确,以从海量的点云数据中提取出有意义的特征。此外,数据集的标注工作也极具挑战性,需要专业知识来识别和分类不同的城市元素。这些挑战不仅影响了数据集的质量,也对后续研究提出了更高的技术要求。
发展历史
创建时间与更新
Oakland 3-D Point Cloud Dataset于2009年首次发布,由美国卡内基梅隆大学机器人研究所创建。该数据集在发布后未有官方更新记录。
重要里程碑
Oakland 3-D Point Cloud Dataset的发布标志着三维点云数据在城市环境分析中的应用迈出了重要一步。该数据集包含了美国奥克兰市多个区域的详细三维点云数据,为研究者提供了丰富的城市环境信息。其数据质量高,覆盖范围广,极大地推动了城市规划、自动驾驶和机器人导航等领域的研究进展。
当前发展情况
尽管Oakland 3-D Point Cloud Dataset自发布以来未有更新,但其对三维点云数据处理和分析技术的贡献依然显著。该数据集为后续的三维城市模型构建、环境感知算法优化以及自动驾驶技术的发展提供了宝贵的基准数据。随着技术的进步,越来越多的研究者和开发者开始利用该数据集进行创新实验,进一步推动了三维点云数据在智能城市和自动驾驶领域的应用。
发展历程
- Oakland 3-D Point Cloud Dataset首次发表,该数据集由美国国家标准与技术研究院(NIST)发布,旨在为三维点云数据分析和机器学习算法提供基准测试数据。
- 该数据集首次应用于计算机视觉领域的研究,特别是在三维重建和目标检测方面,为研究人员提供了丰富的实验数据。
- 随着深度学习技术的发展,Oakland 3-D Point Cloud Dataset被广泛用于训练和验证基于深度学习的三维点云处理模型,推动了相关技术的进步。
- 该数据集在自动驾驶和机器人导航领域的应用逐渐增多,成为评估和改进三维感知算法的重要资源。
- Oakland 3-D Point Cloud Dataset被纳入多个国际会议和研讨会的基准测试任务,进一步提升了其在学术界和工业界的影响力。
常用场景
经典使用场景
在计算机视觉领域,Oakland 3-D Point Cloud Dataset 被广泛用于三维点云数据的分析与处理。该数据集包含了丰富的城市环境点云数据,为研究人员提供了真实世界的三维几何信息。通过这一数据集,研究者可以开发和验证各种算法,如三维物体检测、场景重建和点云分割等,从而推动三维视觉技术的发展。
实际应用
在实际应用中,Oakland 3-D Point Cloud Dataset 被用于自动驾驶、机器人导航和城市规划等领域。例如,自动驾驶系统可以利用该数据集进行道路和障碍物的三维建模,从而提高导航的精度和安全性。此外,城市规划者可以借助这一数据集进行城市环境的数字化重建,为城市设计和规划提供科学依据。
衍生相关工作
基于Oakland 3-D Point Cloud Dataset,许多经典工作得以展开。例如,一些研究者利用该数据集开发了高效的三维物体检测算法,显著提升了检测的准确性和速度。此外,还有研究团队基于此数据集进行了大规模的场景重建实验,推动了三维重建技术的发展。这些衍生工作不仅丰富了三维视觉的研究内容,也为实际应用提供了强有力的技术支持。
以上内容由遇见数据集搜集并总结生成


