OCID
收藏arXiv2025-09-30 收录
下载链接:
https://www.acin.tuwien.ac.at/en/vision-for-robotics/software-tools/object-clutter-indoor-dataset/
下载链接
链接失效反馈官方服务:
资源简介:
该数据集名为OCID_grasp,包含了1,763张精心挑选的RGB-D图像,这些图像上标注了超过75,000个手工识别的抓握候选点。该数据集专门用于训练抓握检测模型,其训练结果可达92%的准确率。规模上,数据集包含了1,763张图像,任务集中在抓握检测。
OCID_grasp is the name of this dataset, which includes 1,763 carefully curated RGB-D images with over 75,000 manually annotated grasp candidates across all these images. It is specifically developed for training grasp detection models, and models trained on this dataset can achieve an accuracy of up to 92%. Comprising 1,763 images, the dataset focuses on the task of grasp detection.
搜集汇总
数据集介绍
背景与挑战
背景概述
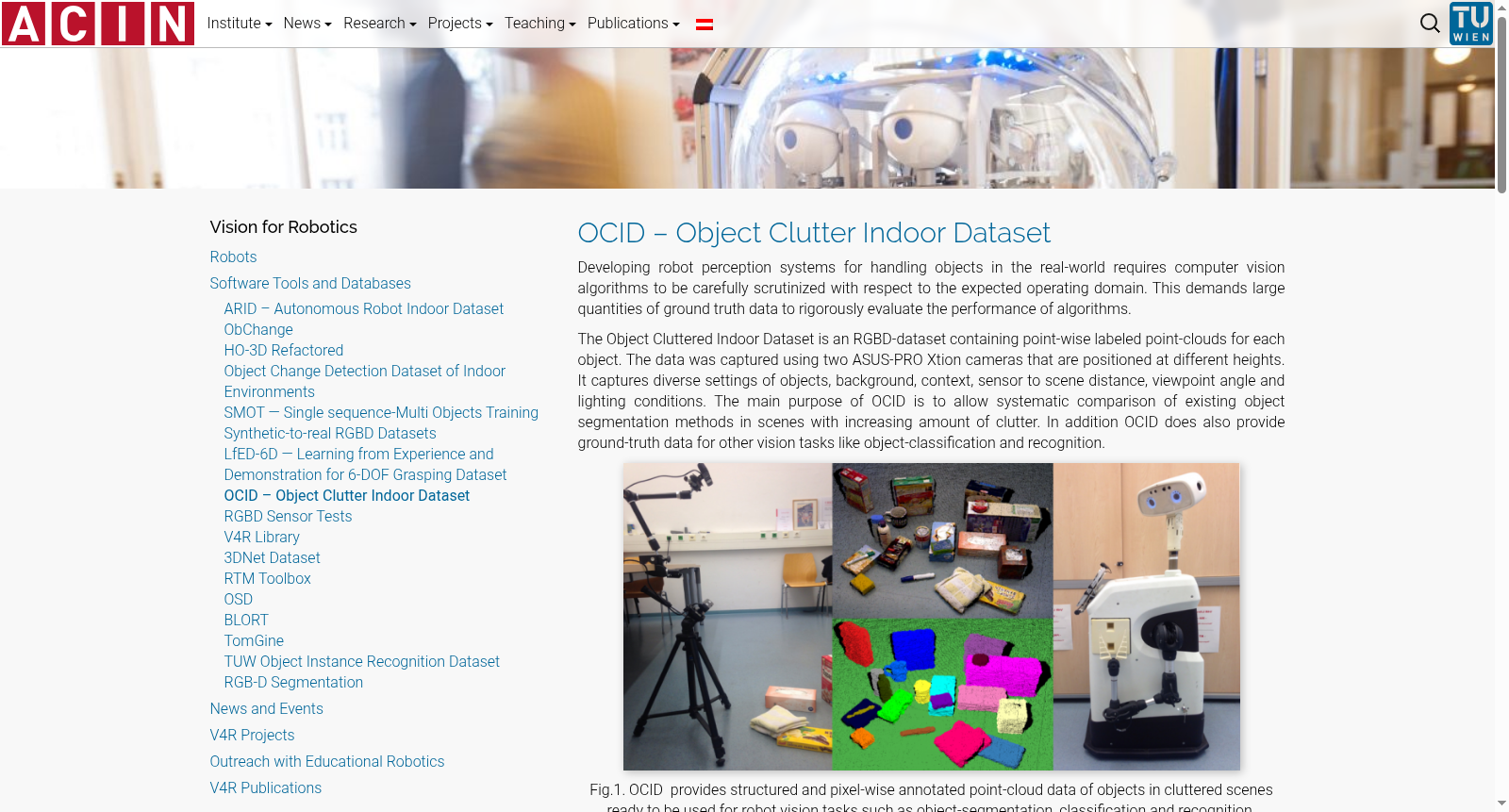
OCID是一个用于机器人视觉任务的RGBD数据集,包含96个逐步增加杂乱对象的场景,共2346个标注点云,适用于对象分割、分类和识别。数据集分为ARID20、ARID10和YCB10三个子集,分别包含不同数量和类型的对象,并提供了语义标注的RGB和深度图像裁剪。
以上内容由遇见数据集搜集并总结生成


