OpenSatMap
收藏arXiv2024-10-31 更新2024-11-01 收录
下载链接:
https://opensatmap.github.io
下载链接
链接失效反馈官方服务:
资源简介:
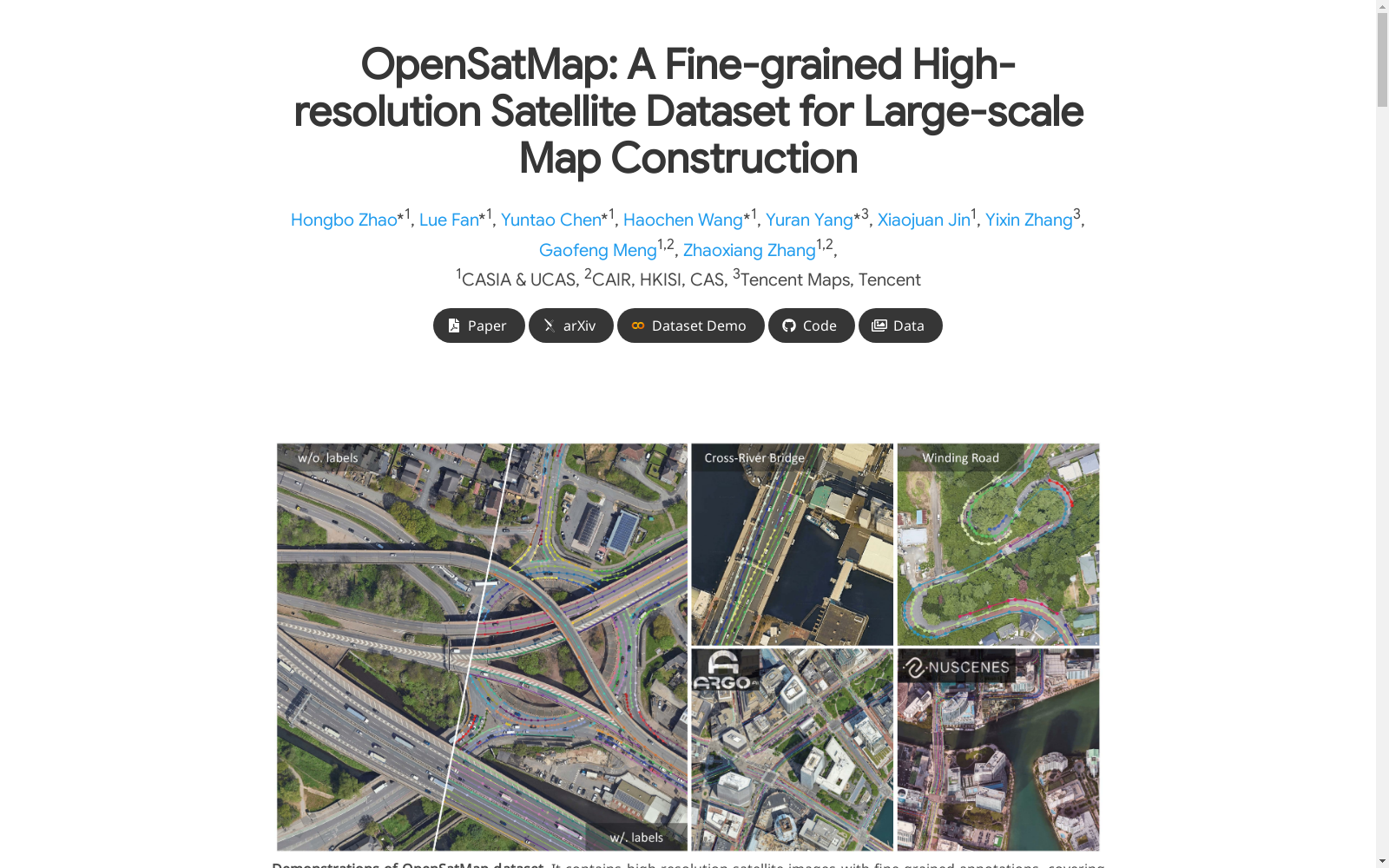
OpenSatMap是由中国科学院自动化研究所等机构创建的一个高分辨率、细粒度的卫星图像数据集,旨在支持大规模地图构建。该数据集包含38,000张1024×1024像素的高分辨率卫星图像,具有细粒度的实例级标注,覆盖了全球60个城市和19个国家的多样化地理环境。数据集的创建过程包括从Google Maps收集图像,并通过专业的标注团队进行细粒度标注。OpenSatMap主要应用于城市规模的地图构建、车道检测和自动驾驶技术,旨在解决现有数据集分辨率低、标注粗糙的问题。
OpenSatMap is a high-resolution, fine-grained satellite image dataset developed by institutions including the Institute of Automation, Chinese Academy of Sciences, aiming to support large-scale map construction. This dataset contains 38,000 high-resolution satellite images with a resolution of 1024×1024 pixels, featuring fine-grained instance-level annotations, and covers diverse geographical environments across 60 cities in 19 countries worldwide. The development process of the dataset involves collecting images from Google Maps and performing fine-grained annotations via professional annotation teams. OpenSatMap is primarily applied to city-scale map construction, lane detection, and autonomous driving technologies, aiming to address the limitations of existing datasets with low resolution and coarse annotations.
提供机构:
中国科学院自动化研究所 (CASIA), 中国科学院人工智能与机器人研究中心 (HKISI), 中国科学院大学 (UCAS), 腾讯地图, 腾讯, 北京邮电大学
创建时间:
2024-10-31
搜集汇总
数据集介绍
构建方式
OpenSatMap 数据集的构建方式体现了对高分辨率卫星图像的精细处理和深度标注。首先,数据集从 Google Maps 的公开 API 中收集了大量高分辨率(级别 20)的卫星图像,这些图像的分辨率达到了 0.15 米每像素,远超现有数据集的分辨率。随后,通过专业的遥感图像标注团队,对这些图像进行了精细的实例级别标注,涵盖了车道线、路缘和虚拟线等多种类别,并赋予了颜色、线型、功能等多达八种属性。此外,数据集还特别考虑了地理多样性和与自动驾驶数据集的对齐,确保了数据的高质量和广泛适用性。
使用方法
OpenSatMap 数据集的使用方法多样,主要应用于城市规模的地图构建、车道线检测和自动驾驶等领域。首先,研究人员可以利用数据集中的高分辨率图像和精细标注进行深度学习模型的训练,以提高车道线检测的准确性和鲁棒性。其次,数据集的地理多样性和与自动驾驶数据集的对齐,使得其可以用于开发和验证自动驾驶系统中的地图构建算法。此外,数据集还可以用于研究遥感图像的语义分割、实例分割和场景分类等任务,推动遥感图像处理技术的发展。为了方便用户使用,数据集提供了完整的代码库和评估工具,用户可以通过项目页面获取详细的使用指南和示例代码。
背景与挑战
背景概述
OpenSatMap,由中科院自动化研究所(CASIA)、香港智能科学与系统研究所(HKISI)和腾讯地图的研究人员共同开发,是一个细粒度、高分辨率的卫星数据集,旨在支持大规模地图构建。该数据集的创建源于对现有卫星数据集在语义标签粗糙、分辨率较低、规模较小以及与自动驾驶数据集不匹配等问题的认识。OpenSatMap通过提供细粒度的实例级标注、高分辨率图像(达到20级)、目前同类数据集中最大的规模以及高度的数据多样性,填补了这一领域的空白。此外,OpenSatMap还与流行的自动驾驶数据集nuScenes和Argoverse 2对齐,旨在推动自动驾驶技术的发展。
当前挑战
OpenSatMap在构建过程中面临多项挑战。首先,从卫星图像中解析细粒度的道路结构以进行地图构建是一项高度复杂的任务,主要由于卫星图像的分辨率通常不足以进行精细的车道线检测。其次,现代城市中的车道线具有高度复杂的拓扑结构和功能性语义,这不仅对设计具有足够容量的模型提出了挑战,也使得构建细粒度数据集变得困难。此外,现有基准数据集的局限性,如粗略的标注、低分辨率、小规模以及与自动驾驶基准的不匹配,也限制了它们在大规模和细粒度地图构建中的有效性。
常用场景
经典使用场景
OpenSatMap 数据集的经典使用场景主要集中在高分辨率卫星图像的细粒度实例级标注上。该数据集特别适用于大规模地图构建任务,尤其是在交通行业中,如导航和自动驾驶。通过从卫星图像中提取道路结构,OpenSatMap 提供了一种高效的方式来构建大规模地图,其高分辨率和细粒度标注使得能够更精确地识别和解析复杂的道路网络。
解决学术问题
OpenSatMap 数据集解决了现有卫星数据集在地图构建中的几个关键学术问题。首先,它提供了细粒度的实例级标注,而非粗略的语义级标注,这使得模型能够更精确地解析复杂的道路标记。其次,OpenSatMap 的高分辨率(达到 20 级)显著提升了道路检测的精度。此外,该数据集的大规模和地理多样性为研究者提供了丰富的数据资源,有助于推动自动驾驶技术的发展。
实际应用
在实际应用中,OpenSatMap 数据集被广泛用于城市规模的地图构建、车道检测和自动驾驶系统。例如,在自动驾驶领域,该数据集的高分辨率和细粒度标注能够帮助车辆更准确地识别和导航复杂的道路环境。此外,OpenSatMap 还与流行的自动驾驶数据集(如 nuScenes 和 Argoverse 2)对齐,进一步增强了其在实际应用中的价值。
数据集最近研究
最新研究方向
在卫星图像处理领域,OpenSatMap数据集的最新研究方向主要集中在高分辨率地图构建和自动驾驶技术的结合上。该数据集通过提供细粒度的实例级标注和高分辨率图像,推动了从卫星图像中提取道路结构的研究。研究者们致力于开发能够有效解析复杂道路网络的算法,以支持城市规模的地图构建和自动驾驶导航。此外,OpenSatMap与流行的自动驾驶数据集如nuScenes和Argoverse 2的对齐,进一步促进了卫星图像在自动驾驶技术中的应用,为高精度地图的实时更新和优化提供了新的可能性。
相关研究论文
- 1OpenSatMap: A Fine-grained High-resolution Satellite Dataset for Large-scale Map Construction中国科学院自动化研究所 (CASIA), 中国科学院人工智能与机器人研究中心 (HKISI), 中国科学院大学 (UCAS), 腾讯地图, 腾讯, 北京邮电大学 · 2024年
以上内容由遇见数据集搜集并总结生成


