MultiGripperGrasp
收藏github2024-08-28 更新2025-02-19 收录
下载链接:
https://irvlutd.github.io/MultiGripperGrasp/
下载链接
链接失效反馈官方服务:
资源简介:
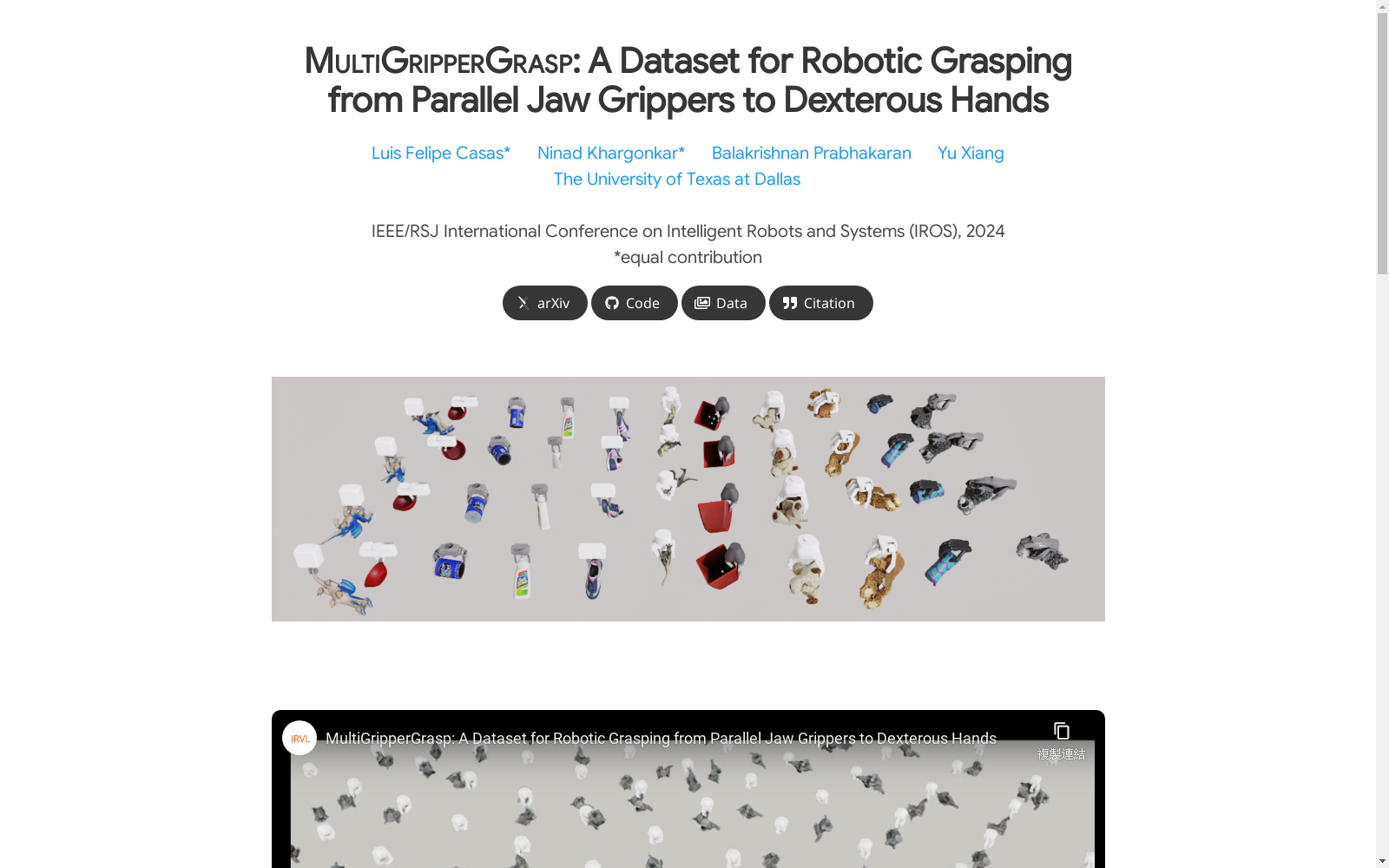
MultiGripperGrasp是由美国德克萨斯大学达拉斯分校计算机科学系的研究团队创建的大规模机器人抓取数据集。该数据集包含3040万种抓取方式,涵盖11种不同类型的夹具(从两指夹具到五指夹具,包括人手)对345个物体的抓取。抓取数据通过Isaac Sim仿真验证,分为成功与失败抓取,并记录物体脱落时间以衡量抓取质量。数据集的独特之处在于夹具的抓取姿势统一标准化,可实现抓取方式在不同夹具间的迁移,显著提升成功抓取数量。该数据集旨在推动机器人通用抓取规划与跨夹具抓取迁移的研究,助力机器人在复杂环境中实现高效、精准的物体操作。
MultiGripperGrasp is a large-scale robotic grasping dataset created by a research team from the Department of Computer Science at the University of Texas at Dallas, USA. This dataset contains 30.4 million grasping configurations, covering 11 distinct types of grippers (ranging from two-fingered grippers to five-fingered grippers, including human hands) performing grasps on 345 distinct objects. All grasping data is validated via Isaac Sim simulations, categorized into successful and failed grasps, with the object drop time recorded to quantify grasping quality. A unique feature of this dataset is that the grasping poses of the grippers are uniformly standardized, enabling the transfer of grasping strategies across different grippers and significantly increasing the number of successful grasps. This dataset aims to advance research in robotic general grasping planning and cross-gripper grasp transfer, and facilitate robots to perform efficient and precise object manipulation in complex environments.
提供机构:
德克萨斯大学
创建时间:
2024-08-28
搜集汇总
数据集介绍
构建方式
在机器人抓取技术的领域研究中,MultiGripperGrasp数据集应运而生。该数据集的构建采用了模拟环境与现实世界数据相结合的方式,通过模拟器生成多种抓取任务的三维场景,同时收集真实机器人的传感器数据,确保数据集的多样性与准确性。经过精心筛选与标注,形成了涵盖不同抓取对象、场景与抓取策略的综合性数据集。
特点
MultiGripperGrasp数据集的特色在于其全面性与实用性。它不仅包含了丰富的抓取场景和对象类型,还涵盖了多种抓取策略,为研究者提供了全面的研究素材。此外,数据集的标注质量高,确保了训练模型的效率和准确性。数据集的开放性使得不同研究背景的用户均能方便地使用和扩展。
使用方法
使用MultiGripperGrasp数据集时,用户可首先通过其提供的预览工具进行数据浏览,以理解数据集的结构和内容。随后,用户可根据研究需求,通过数据集提供的API进行数据的读取和处理。数据集支持多种格式的输出,便于用户进行模型训练、验证和测试。同时,用户社区提供的文档和教程也大大降低了使用门槛。
背景与挑战
背景概述
在机器人抓取技术领域,MultiGripperGrasp数据集的构建对于推动多指机械手抓取策略的研究具有重大意义。该数据集由苏黎世联邦理工学院(ETH Zurich)的研究团队于近年创建,旨在解决多指机械手在不同场景下的自适应抓取问题。数据集汇集了大量机械手抓取物体的三维图像和深度信息,为研究人员提供了一个丰富的实验平台,对于理解和优化机械手的抓取策略,提升其在实际应用中的性能有着重要的影响力。
当前挑战
MultiGripperGrasp数据集在构建过程中面临了多项挑战。首先,如何精确地捕捉和记录机械手与物体交互时的三维信息是一个技术难题。其次,数据集的多样性和代表性对实验结果的普遍性至关重要,因此确保数据在不同环境和条件下的广泛覆盖是一个挑战。此外,数据集在解决多指机械手的自适应抓取问题时,还需克服如何有效融合多模态信息、提高抓取算法的鲁棒性和实时性等挑战。
常用场景
经典使用场景
在机器人抓握研究领域,MultiGripperGrasp数据集被广泛用于模拟和评估多指爪子的抓握能力。该数据集提供了多种物体在不同抓握配置下的三维模型和抓握结果,研究者可以借助此数据集进行深度学习模型的训练,以实现自动化的抓握策略生成。
解决学术问题
MultiGripperGrasp数据集解决了多指机器人抓握研究中抓握策略评估标准不统一的问题,通过提供大量抓握实例和结果,为研究者提供了一个客观的评估基准。此外,该数据集还帮助研究者理解不同抓握配置对抓握性能的影响,从而推动抓握策略的优化。
衍生相关工作
基于MultiGripperGrasp数据集,研究者已开展了众多相关工作,如抓握预测模型、抓握策略优化算法等。这些工作不仅促进了多指机器人抓握技术的进步,还为机器人学领域提供了新的研究思路和方法论。
以上内容由遇见数据集搜集并总结生成


