Object Cluttered Indoor Dataset (OCID)
收藏arXiv2019-03-01 更新2024-06-21 收录
下载链接:
https://www.acin.tuwien.ac.at/object-clutter-indoor-dataset/
下载链接
链接失效反馈官方服务:
资源简介:
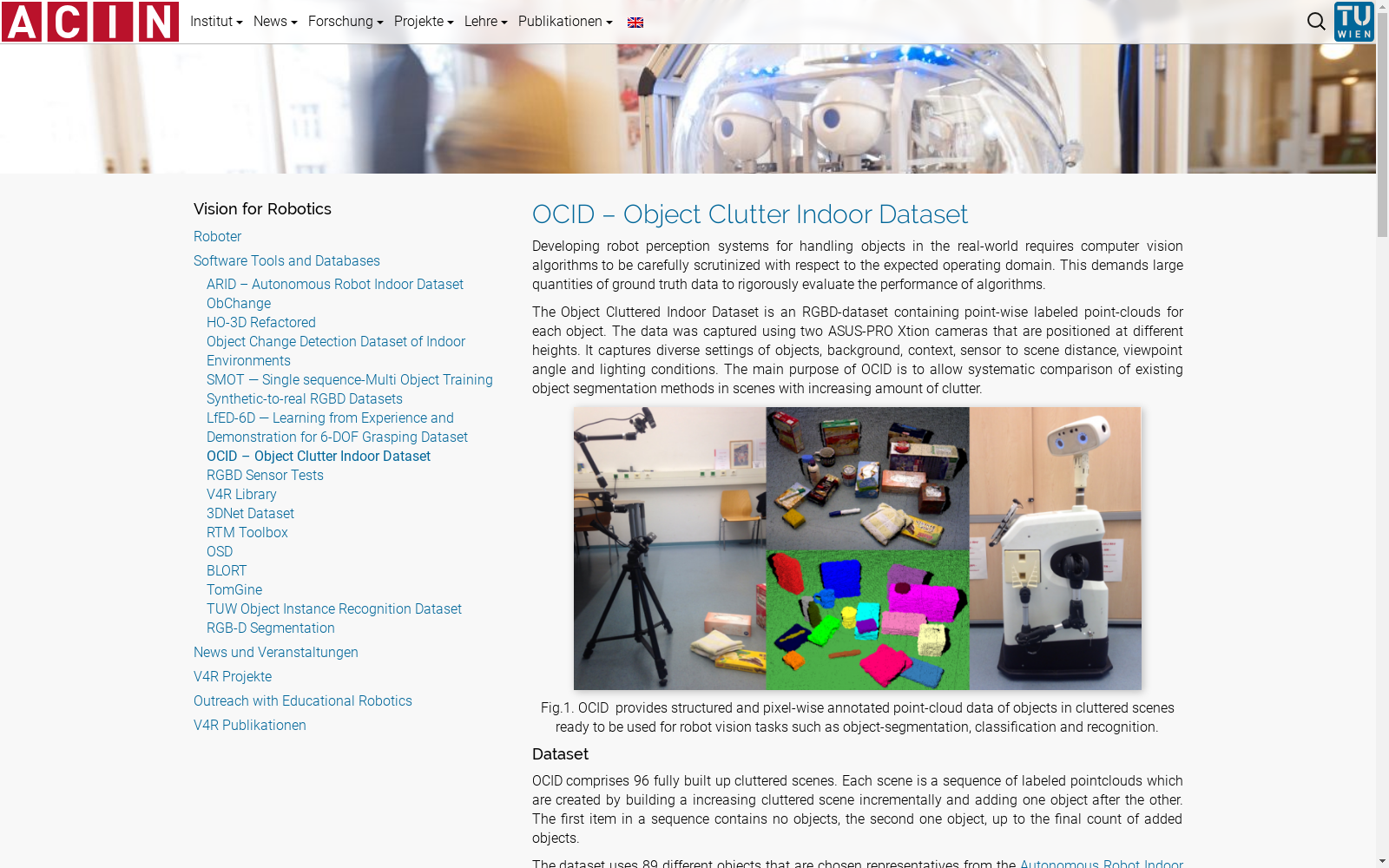
Object Cluttered Indoor Dataset (OCID) 是由维也纳工业大学自动化与控制研究所机器人视觉实验室创建的数据集,专注于室内环境中物体的密集杂乱场景。该数据集包含2346个场景,总计10,240个单独的物体掩码,涵盖了多种物体、背景、光照条件和视角。创建过程中,利用EasyLabel工具进行半自动像素级标注,无需预先的物体模型知识。OCID数据集主要用于评估和比较现有的物体分割方法,特别是在机器人视觉领域的实际应用中,帮助理解和解决机器人在真实世界中面临的挑战。
Object Cluttered Indoor Dataset (OCID) was developed by the Robot Vision Laboratory of the Institute of Automation and Control, Vienna University of Technology, focusing on dense cluttered object scenes in indoor environments. This dataset contains 2346 scenes and a total of 10,240 individual object masks, covering diverse objects, backgrounds, lighting conditions and viewpoints. During its construction, the EasyLabel tool was used for semi-automatic pixel-level annotation without requiring prior knowledge of object models. The OCID dataset is mainly employed to evaluate and compare existing object segmentation methods, especially in practical robotic vision applications, to help understand and resolve the challenges faced by robots in real-world scenarios.
提供机构:
维也纳工业大学自动化与控制研究所机器人视觉实验室
创建时间:
2019-02-05
搜集汇总
数据集介绍
构建方式
Object Cluttered Indoor Dataset (OCID) 的构建方法是基于 EasyLabel 工具,该工具通过半自动化的过程,逐步构建复杂场景并利用深度变化提取精确的对象掩码。EasyLabel 利用深度传感器在每次构建场景的阶段进行数据捕获,并利用深度变化进行对象分割。这个过程不需要预先知道对象的模型,因此可以用于标注任意对象,包括非刚性或变形对象。构建过程中,每个阶段的数据被记录并用于后续阶段的标注,从而减少了人工标注的时间。
使用方法
OCID 数据集的使用方法是通过 EasyLabel 工具进行半自动化的标注,从而生成高质量的像素级标注数据。这些标注数据可以用于评估和开发分割方法,以及用于其他视觉任务,例如对象检测和分类。OCID 数据集的结构允许系统地评估分割方法,特别是对于杂乱程度、传感器到场景的距离、背景和视角等特定因素。数据集还包含了自动提取的 2D 边界框和裁剪图像,可以用于对象检测和分类。此外,数据集还可以用于交互式分割,为连续帧生成标注数据。
背景与挑战
背景概述
在机器人视觉领域,对于现实世界中的物体识别算法进行精细评估,需要大量的真实标注数据。现有的数据集大多只提供RGB图像中的边界框标注,而像素级的标注数据则因需要手动绘制物体轮廓而耗时且易出错。为此,研究人员开发了一种名为EasyLabel的半自动像素级物体标注工具,用于在密集杂乱的场景中获取高质量的标注数据。EasyLabel通过逐步构建复杂场景,并利用深度变化在每个步骤中提取精确的物体掩码。基于EasyLabel,研究人员创建了Object Cluttered Indoor Dataset (OCID),该数据集捕捉了物体、背景、环境、传感器与场景的距离、视角角度和光照条件等多样化的设置。OCID数据集的创建为评估现有物体分割方法提供了一个系统性的比较基准,支持像素级和物体级的标注,以推动机器人视觉向更现实的应用发展。
当前挑战
OCID数据集和相关工具EasyLabel在推动机器人视觉领域的发展中面临着一些挑战。首先,在构建数据集的过程中,如何确保像素级标注的准确性和一致性是一个关键问题。其次,由于场景的复杂性,如何高效地处理和标注大量的数据也是一个挑战。此外,现有的分割方法在面对高度纹理化或颜色相似的物体和背景时,其性能可能会受到很大影响。为了解决这些问题,研究人员需要进一步改进EasyLabel工具,并探索更有效的分割算法,以提高在复杂场景中的分割准确性。
常用场景
经典使用场景
Object Cluttered Indoor Dataset (OCID) 是一个用于评估和开发物体分割方法的室内场景数据集。它由 2346 个场景或 10,240 个单独的对象掩模组成,涵盖了从无杂乱到密集杂乱的场景,以及不同的背景、光照条件和传感器到场景的距离。OCID 数据集是使用 EasyLabel 工具生成的,该工具可以半自动地为密集杂乱场景中的对象生成高质量的像素级真实标注。
解决学术问题
OCID 数据集解决了在密集杂乱和遮挡场景中深度评估视觉方法的问题。现有的大多数数据集只提供 RGB 图像中的边界框标注,这不足以深入评估视觉方法。OCID 数据集提供了像素级标注,可以更准确地评估物体分割方法的性能。此外,OCID 数据集还包含了不同数量的对象、背景和光照条件,可以系统地评估分割方法的性能,并捕获与机器人系统相关的相关因素。
实际应用
OCID 数据集可以用于评估和开发机器人视觉系统。它可以用于训练和测试物体检测、分割和分类等视觉算法。OCID 数据集还可以用于开发交互式分割系统,该系统需要连续帧的真实标注。此外,OCID 数据集还可以用于开发场景重建和 6D 位姿估计等机器人技术。
数据集最近研究
最新研究方向
Object Cluttered Indoor Dataset (OCID)作为机器人视觉领域的重要数据集,其研究重点在于如何在复杂环境中准确分割和识别物体。OCID数据集通过EasyLabel工具实现了像素级的物体标注,并涵盖了不同背景、光照条件、视角和物体距离传感器等多样场景。这一特性使其成为评估和比较现有物体分割方法的理想平台。当前研究利用OCID数据集系统地分析了现有分割方法在不同场景下的性能,揭示了基于深度信息的分割方法在复杂场景中的优势。此外,OCID数据集也为其他视觉任务,如物体检测和分类,提供了丰富的标注数据,有助于推动机器人视觉在复杂环境中的应用。未来研究将扩展OCID数据集,并探索其在深度学习训练中的应用,以进一步推动机器人视觉技术的发展。
相关研究论文
- 1EasyLabel: A Semi-Automatic Pixel-wise Object Annotation Tool for Creating Robotic RGB-D Datasets维也纳工业大学自动化与控制研究所机器人视觉实验室 · 2019年
以上内容由遇见数据集搜集并总结生成


