Semantic Replica
收藏github2025-08-22 更新2025-08-23 收录
下载链接:
https://github.com/SeryeongKim/Semantic_Replica
下载链接
链接失效反馈官方服务:
资源简介:
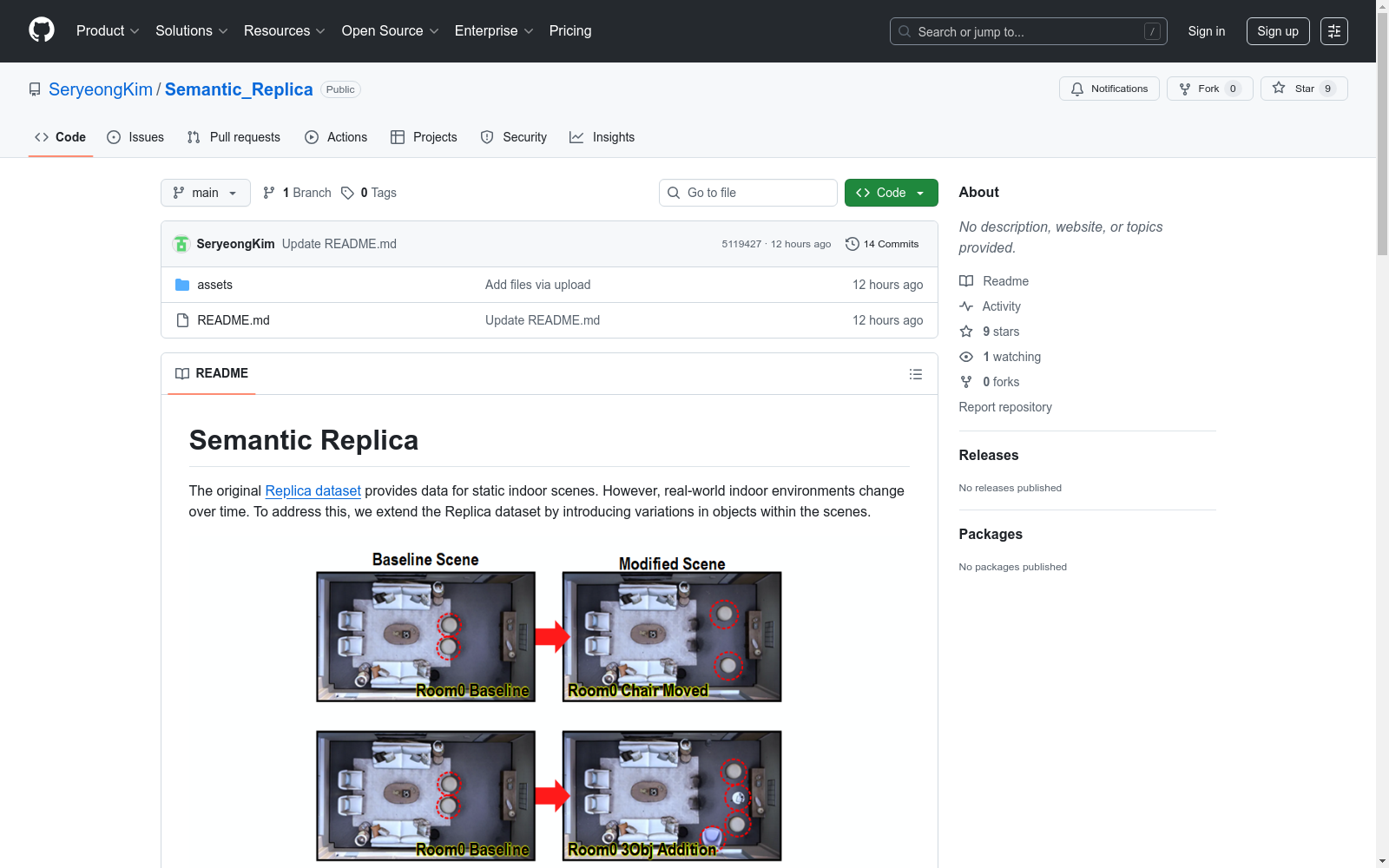
Semantic Replica是对原始Replica数据集的扩展,通过引入场景中对象的变化来模拟真实世界室内环境随时间的变化。该数据集包含修改后的室内场景,提供了2D原始图像、可编辑的Blender项目、指令集和场景图表示。数据集使用3DSSG网络提取场景图,并生成问答对,可用于图视觉问答任务。
Semantic Replica is an extension of the original Replica dataset, which simulates the temporal variation of indoor environments in the real world by introducing changes in objects within the scene. The dataset includes modified indoor scenes, providing 2D original images, editable Blender projects, instruction sets, and scene graph representations. It employs the 3DSSG network to extract scene graphs and generate question-answer pairs, which are applicable to visual question answering tasks.
创建时间:
2025-08-22
原始信息汇总
Semantic Replica 数据集概述
数据集简介
Semantic Replica 是基于原始 Replica 数据集扩展的静态室内场景数据集,通过引入场景内物体的变化来模拟真实世界室内环境随时间的变化。
数据集格式
每个自定义场景包含以下资源文件:
文件结构
data/ ├── <scene_name>/ │ └── gt_images/ │ └── images_001.png │ └── ... │ └── <scene_name>.blend │ └── instructions.json │ └── scengraphs.json
文件说明
- gt_images:场景的原始2D图像集合,可通过COLMAP处理并用于3D高斯喷溅
- <scene_name>.blend:包含几何、材质和纹理的可编辑Blender项目,用于可视化和进一步场景修改
- instructions.json:描述命令或操作的指令集,可用于图注意力网络的问答任务
- scenegraphs.json:场景的图形表示,关系由3D场景图生成网络生成,用于图注意力网络的问答任务
修改场景详情
数据集包含以下修改场景:
| 场景名称 | 修改描述 |
|---|---|
| room0_chair_moved | 在room0中,将中央的两个棕色凳子移至右侧 |
| room0_3obj_addition | 在room0中,将中央的两个棕色凳子移至右侧,并在凳子附近添加了蓝色椅子和白色桌子 |
| room1_chair_addition | 在room1中,在场景左侧添加了蓝色椅子 |
| room1_table_addition | 在room1中,在场景左侧添加了白色桌子 |
| office3_chair_moved | 在office3中,将中央的蓝色椅子移至右侧 |
| office3_5obj_addition | 在office3中,将中央的蓝色椅子移至右侧,并在椅子附近添加了白色花瓶、黑色花盆、白色桌子和显示器 |
数据获取方式
使用以下命令下载数据集: bash pip install gdown gdown 1eVPZ00ayYmfL-RWtOyLlkv7y6cGO8UcZ -O data.zip unzip data.zip
许可证信息
版权所有 (c) 2025 KAIST SSL team-sr
搜集汇总
数据集介绍
构建方式
在室内场景理解领域,Semantic Replica数据集通过扩展原始Replica数据集构建而成,其核心在于引入动态物体变化以模拟真实环境演变。构建过程中,研究团队对多个静态场景进行了物体移动与添加操作,例如将椅子移位或新增桌椅组合,并利用Blender项目文件保存几何与材质信息。每一场景均通过3DSSG网络从多视角图像中推断三维空间关系,生成结构化场景图,同时配套生成与场景修改对应的问答指令对,形成多模态数据资源。
使用方法
使用者可通过下载压缩包并解压获得结构化数据目录,每个子场景包含图像文件夹、Blender工程文件、场景图JSON及指令JSON四类资源。研究人员可将图像输入COLMAP进行三维重建,或直接用于训练神经渲染模型;场景图文件符合GAT图神经网络输入规范,支持端到端视觉推理任务训练;指令文件则可与场景图联合输入预训练VQA模型,进行语义推理与问答生成验证。Blender文件允许用户进一步编辑场景或渲染新视角,扩展研究可能性。
背景与挑战
背景概述
语义复刻数据集由韩国科学技术院SSL团队于2025年基于Facebook Research的原始Replica数据集扩展构建,专注于动态室内场景的语义理解研究。该数据集通过引入场景内物体的时空变化,突破了静态环境建模的局限性,为三维场景图生成与视觉问答任务提供了多模态数据支持。其创新性地融合了三维高斯表示与图神经网络技术,推动了室内场景语义解析与具身智能交互研究的发展,成为动态环境感知领域的重要基准。
当前挑战
该数据集核心挑战在于解决动态室内场景中物体关系演变的建模问题,需准确捕捉物体位置变化与属性更迭带来的语义差异。构建过程中面临三维场景图自动生成的精度挑战,需通过3DSSG网络在稀疏视角下实现跨模态关系推理;同时需确保生成的问题-答案对与场景变化保持语义一致性,这对多模态数据的协同标注与质量验证提出了较高要求。
常用场景
经典使用场景
在三维场景理解研究中,Semantic Replica数据集通过提供动态变化的室内场景数据,为场景图生成与视觉问答任务建立了经典范式。该数据集不仅包含原始场景的二维图像与三维模型,还引入了物体位置移动与新增物体的变体场景,完美支持基于GAT网络的视觉推理研究。研究者可利用其丰富的场景图标注与问答对,深入探索动态环境下的语义关系演化规律。
解决学术问题
该数据集有效解决了静态场景数据集难以捕捉环境动态变化的学术瓶颈,为三维场景语义理解提供了时序维度拓展。通过融合3DSSG网络生成的场景图与GAT兼容的问答对,它支撑了跨模态推理、场景演化分析等核心研究方向。其精心设计的物体移动与添加变体,为研究物体关系动态建模提供了可靠基准,显著推进了智能体环境交互理解的理论发展。
实际应用
在机器人自主导航领域,该数据集能够训练系统理解室内环境的结构化语义变化,提升对动态家居场景的适应性。增强现实应用则可借助其丰富的场景变体数据,实现更精准的虚拟物体与现实环境的语义对齐。智能家居系统通过学习该数据集中的物体关系演化模式,可发展出对家庭环境状态变化的预测与响应能力。
数据集最近研究
最新研究方向
在三维视觉与场景理解领域,Semantic Replica数据集通过引入动态物体变换与场景图表征机制,推动了室内场景语义推理研究的前沿发展。该数据集基于原始Replica静态场景扩展构建,结合3DSSG网络生成的空间关系图谱与GAT模型兼容的问答对,为视觉问答与场景图推理任务提供了多模态数据支撑。当前研究热点集中于利用三维高斯散射技术实现动态场景的实时语义重建,以及探索神经符号系统在复杂室内环境中的因果推理能力,这一方向对服务机器人环境交互与增强现实应用具有重要价值。
以上内容由遇见数据集搜集并总结生成


