MOMAGEN
收藏arXiv2025-10-21 更新2025-10-23 收录
下载链接:
https://momagen.github.io/
下载链接
链接失效反馈官方服务:
资源简介:
MOMAGEN是一个用于生成双臂移动操作演示数据的数据集。该数据集通过解决可达性和可视性问题,在满足硬约束(如可达性)的同时平衡软约束(如导航时的可视性),从而生成大规模的多样化数据集。数据集的创建过程采用了一种约束优化问题框架,以确保生成的数据在模拟环境中有效,并可用于训练有效的模仿学习策略。MOMAGEN旨在解决移动操作任务中数据收集成本高、耗时长的问题,并通过合成额外的数据来扩展数据收集。
MOMAGEN is a dataset developed for generating dual-arm mobile manipulation demonstration data. This dataset addresses both reachability and visibility issues, balances soft constraints such as visibility during navigation while satisfying hard constraints like reachability, to produce large-scale and diverse datasets. The dataset creation process adopts a constrained optimization framework, ensuring that the generated data is valid in simulated environments and can be used to train effective imitation learning strategies. MOMAGEN aims to solve the problems of high cost and long time consumption in data collection for mobile manipulation tasks, and expands data collection by synthesizing additional data.
提供机构:
斯坦福大学
创建时间:
2025-10-21
原始信息汇总
MoMaGen 数据集概述
数据集名称
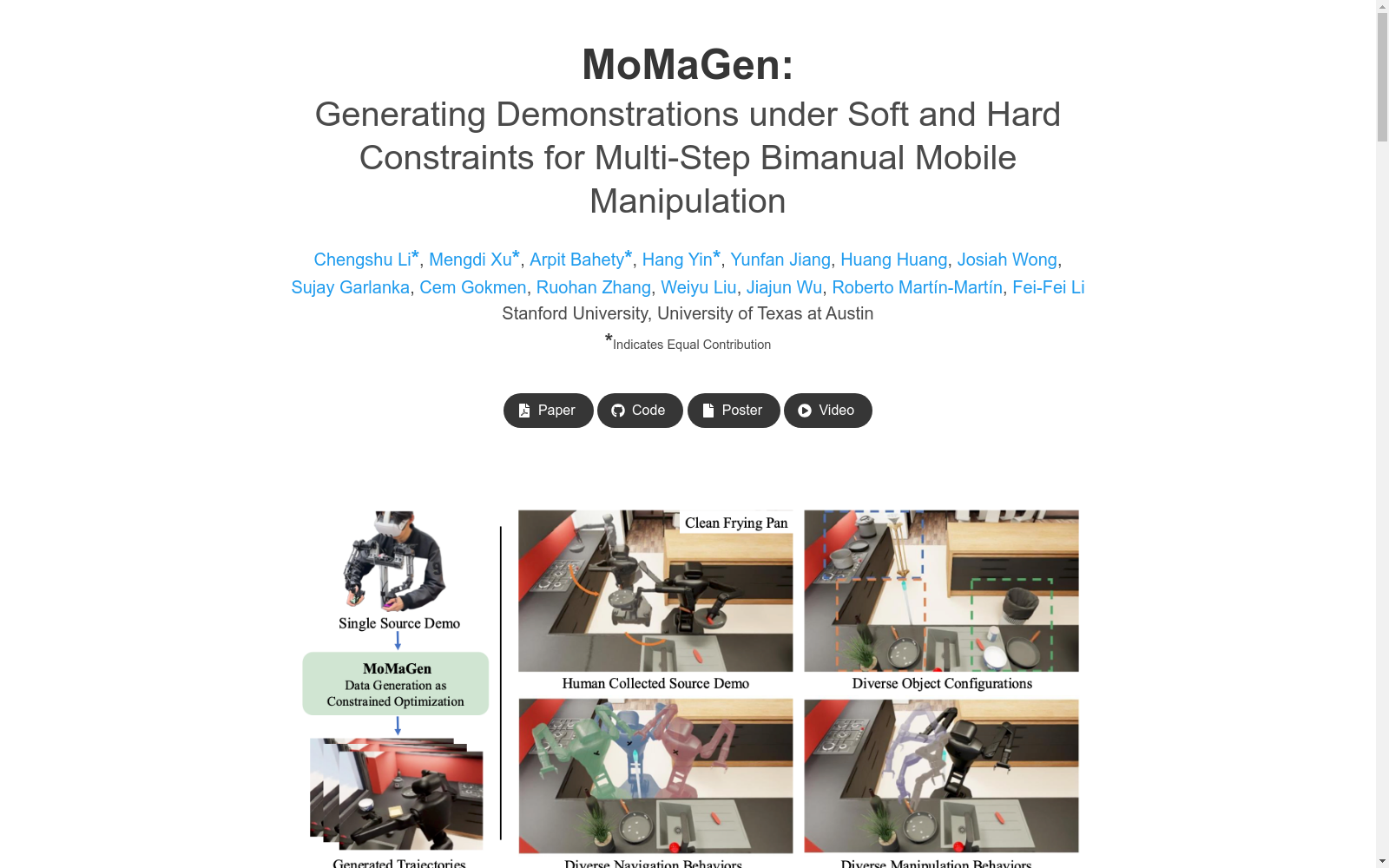
MoMaGen: Generating Demonstrations under Soft and Hard Constraints for Multi-Step Bimanual Mobile Manipulation
作者
Chengshu Li*, Mengdi Xu*, Arpit Bahety*, Hang Yin*, Yunfan Jiang, Huang Huang, Josiah Wong, Sujay Garlanka, Cem Gokmen, Ruohan Zhang, Weiyu Liu, Jiajun Wu, Roberto Martín-Martín, Fei-Fei Li
(*表示同等贡献)
机构
斯坦福大学、德克萨斯大学奥斯汀分校
研究目标
开发自动化数据生成框架,解决多步骤双手机器人移动操作中的数据收集挑战
核心方法
- 将数据生成建模为约束优化问题
- 满足硬约束(如可达性)和软约束(如导航过程中的可见性)
- 基于单源演示生成多样化数据集
技术特点
- 支持跨平台数据生成(如Galexea R1机器人和TIAGo机器人)
- 通过规划密集末端执行器轨迹实现机器人无关性
- 支持D2级别的激进场景随机化
评估任务
- 拾取杯子(Pick Cup)
- 整理桌子(Tidy Table)
- 清洁平底锅(Clean Pan)
- 收拾餐具(Put Dishes Away)
实验结果
- 生成的数据集比先前方法更加多样化
- 可用于训练成功的模仿学习策略
- 支持仿真到真实世界的策略迁移
相关资源
- 论文
- 代码
- 海报
- 视频
搜集汇总
数据集介绍
构建方式
在机器人学习领域,大规模示范数据收集面临成本高昂的挑战。MOMAGEN通过将数据生成构建为约束优化问题,以单个人类示范为种子,在仿真环境中自动合成多样化轨迹。该方法严格满足可达性和操作可见性等硬约束条件,同时平衡导航可见性和收缩配置等软约束,通过运动规划和任务空间控制生成符合真实机器人执行能力的示范数据。
特点
该数据集在双手机器人移动操作任务中展现出显著优势。其核心特征在于通过基座位姿采样实现了工作空间的扩展,能够覆盖更广泛的对象配置范围。数据集特别注重任务相关对象的可见性保障,通过硬约束确保操作过程中目标始终处于视野范围内。此外,数据集还包含丰富的导航行为变异和协调双臂操作轨迹,为视觉运动策略训练提供了高质量的多样化样本。
使用方法
该数据集主要服务于模仿学习算法的训练与验证。研究人员可直接使用生成的示范轨迹训练端到端视觉运动策略,如WB-VIMA和π0等模型。数据集支持从仿真到实物的迁移学习,通过少量真实世界示范进行微调即可实现实际部署。在使用过程中,建议根据具体任务需求选择适当的域随机化级别,并注意对冻结轨迹段进行预处理以提升训练效果。
背景与挑战
背景概述
MOMAGEN数据集由斯坦福大学和德克萨斯大学奥斯汀分校的研究团队于2025年提出,聚焦于双手机器人移动操作领域的数据生成挑战。该数据集旨在通过单个人类演示样本,在仿真环境中自动合成大规模、多样化的操作轨迹,以解决机器人模仿学习中数据收集成本高昂的问题。其核心研究问题在于如何协调移动底盘与高自由度双臂的协同控制,同时确保操作可达性和视觉可见性,为复杂家庭任务中的机器人策略训练提供了关键数据支撑,显著推动了移动操作领域的可扩展性研究。
当前挑战
MOMAGEN数据集主要应对双手机器人移动操作中两大核心挑战:一是操作可达性问题,移动基座需动态调整位置以适应随机化物体布局,确保后续操作可行性;二是视觉可见性难题,主动相机需在导航和操作阶段维持任务相关物体的观测,以支持视觉运动策略训练。在构建过程中,数据集生成面临严格约束优化难题,需同时满足硬约束(如运动学可行性和碰撞避免)与软约束(如导航中的物体跟踪),并克服仿真到现实转移时的视觉域差异和计算资源密集型规划等工程挑战。
常用场景
经典使用场景
在双手机器人移动操作领域,MOMAGEN数据集通过单个人类演示样本生成大规模多样化训练数据,为复杂家庭环境中的多步骤操作任务提供关键支撑。该数据集特别适用于需要协调导航与双臂操作的场景,如清洁煎锅、整理餐桌等日常家务活动,通过约束优化框架确保生成轨迹的可行性与视觉可见性。
衍生相关工作
该数据集推动了X-Gen系列方法的演进,通过统一约束优化框架整合了SkillMimicGen的运动规划与DexMimicGen的双臂协调优势。其提出的可见性约束机制启发了后续视觉运动策略研究,相关技术已被拓展至包含关节物体的操作任务及跨机器人平台的数据生成,为通用移动操作系统的开发奠定了重要基石。
数据集最近研究
最新研究方向
在机器人模仿学习领域,MOMAGEN数据集代表了双手机器人移动操作数据生成的前沿突破。该数据集通过将数据生成构建为带约束的优化问题,创新性地解决了移动基座带来的可达性与主动相机引发的可见性两大核心挑战。当前研究聚焦于利用单一人类演示样本,在仿真环境中生成满足硬约束(如可达性、操作过程中的可见性)与软约束(如导航过程中的可见性)的多样化演示数据。这一方法显著提升了生成数据的多样性与质量,使得基于该数据训练的模仿学习策略仅需少量真实世界数据(40个演示)即可成功部署到实体机器人系统。该数据集的研究方向正推动机器人学习从静态桌面操作向复杂移动操作场景的跨越,为家庭服务机器人等实际应用奠定了重要基础。
相关研究论文
- 1MoMaGen: Generating Demonstrations under Soft and Hard Constraints for Multi-Step Bimanual Mobile Manipulation斯坦福大学 · 2025年
以上内容由遇见数据集搜集并总结生成


