3DSRBench
收藏arXiv2024-12-11 更新2024-12-13 收录
下载链接:
https://3dsrbench.github.io/
下载链接
链接失效反馈官方服务:
资源简介:
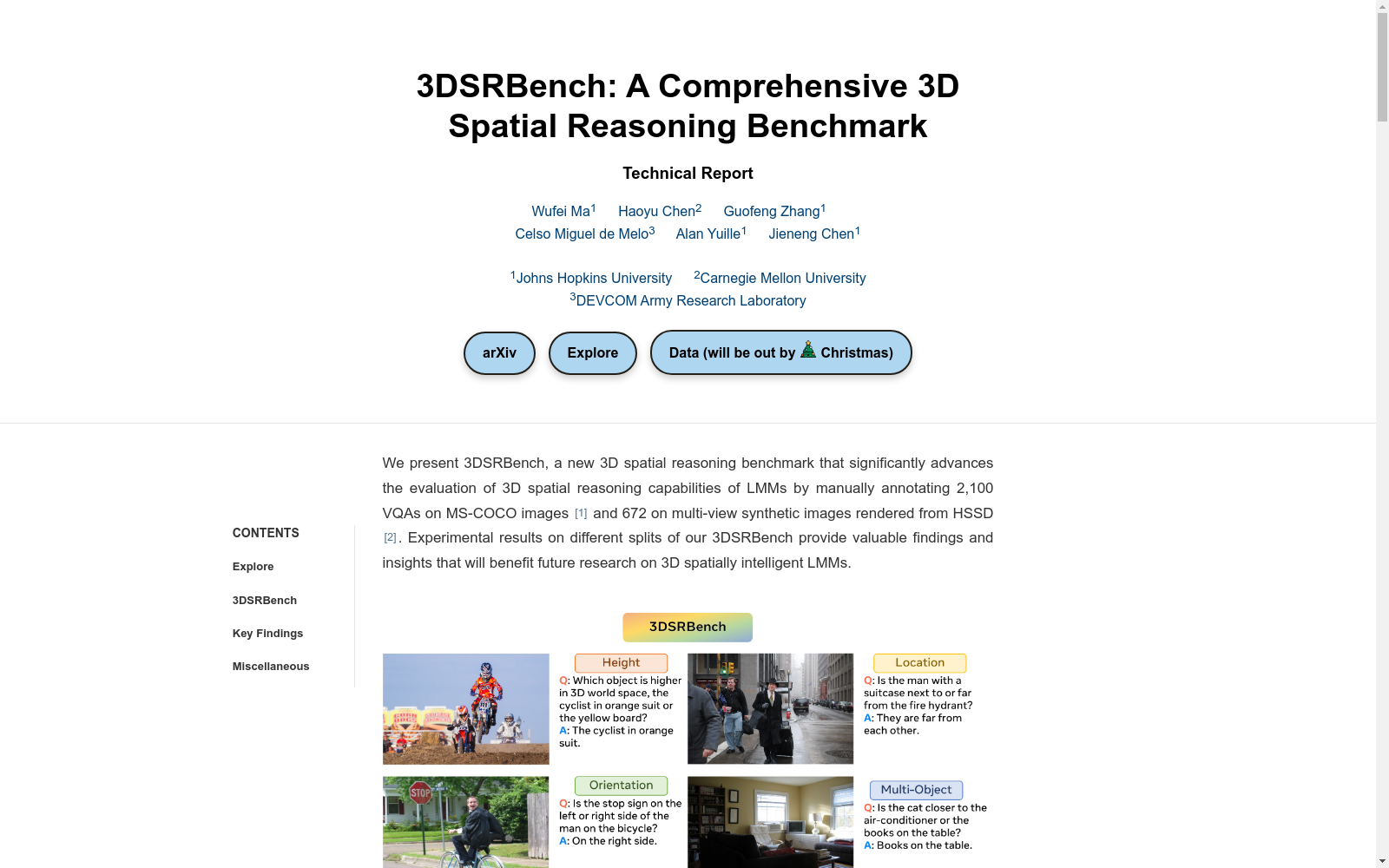
3DSRBench是一个全面的3D空间推理基准数据集,由约翰斯·霍普金斯大学等机构创建。该数据集包含2,772个手动标注的视觉问答对,涵盖12种问题类型,涉及高度、位置、方向和多对象推理等4个主要类别。数据集的内容来自MSCOCO和HSSD数据集,通过人工标注和多视角合成图像生成。创建过程包括平衡数据分布、避免简单答案问题以及采用FlipEval策略进行评估。该数据集主要用于评估和提升大模态模型(LMMs)在3D空间推理任务中的表现,特别是在自动驾驶、机器人和AR/VR等领域的应用。
3DSRBench is a comprehensive 3D spatial reasoning benchmark dataset created by institutions including Johns Hopkins University. It contains 2,772 manually annotated visual question-answer pairs, covering 12 question types spanning four core categories: height, position, orientation, and multi-object reasoning. The dataset content is sourced from the MSCOCO and HSSD datasets, and is generated through manual annotation and multi-view synthetic image generation. Its development process includes balancing the data distribution, eliminating questions with overly simple answers, and adopting the FlipEval strategy for evaluation. This dataset is primarily used to evaluate and enhance the performance of large multimodal models (LMMs) on 3D spatial reasoning tasks, especially for applications in autonomous driving, robotics, and AR/VR domains.
提供机构:
约翰斯·霍普金斯大学, 卡内基梅隆大学, DEVCOM陆军研究实验室
创建时间:
2024-12-11
搜集汇总
数据集介绍
构建方式
3DSRBench数据集通过手动标注的方式构建,涵盖了2,772个视觉问答对,分布在12种不同的问题类型中。数据集的构建基于MS-COCO数据集中的自然图像,并进一步扩展到多视角的合成图像,以研究不同相机视角下的3D空间推理能力。为了确保数据集的多样性和平衡性,研究团队采用了多种设计策略,包括避免简单答案的问题、平衡数据分布以及引入FlipEval策略来消除左右偏差。
使用方法
3DSRBench数据集可用于评估和提升大模型的3D空间推理能力。研究者可以通过该数据集对模型进行基准测试,分析其在不同类型问题上的表现,并进一步优化模型的视觉编码器和推理机制。此外,数据集的多样性和平衡性设计使其适用于多种下游任务,如自动驾驶和机器人操作,帮助模型在这些任务中更好地理解和推理3D空间关系。
背景与挑战
背景概述
3DSRBench是由约翰霍普金斯大学、卡内基梅隆大学和DEVCOM陆军研究实验室的研究团队联合开发的一个全面的三维空间推理基准数据集。该数据集于2024年发布,旨在评估大型多模态模型(LMMs)在三维空间推理任务中的表现。3DSRBench包含了2,772个手工标注的视觉问答对,涵盖12种不同类型的三维空间推理问题,涉及高度、位置、方向和多对象推理等多个维度。该数据集的创建不仅填补了现有数据集在三维空间推理方面的空白,还为研究者提供了评估和提升LMMs三维空间推理能力的重要工具,尤其是在自动驾驶、机器人和增强现实/虚拟现实等领域的应用中具有重要意义。
当前挑战
3DSRBench在构建过程中面临了多个挑战。首先,三维空间推理任务本身具有复杂性,要求模型能够理解物体在三维空间中的位置、方向和相互关系,这对模型的三维感知能力提出了高要求。其次,数据集的构建需要手工标注大量复杂的视觉问答对,确保数据集的多样性和平衡性,避免模型利用数据中的偏见或捷径。此外,3DSRBench还引入了FlipEval策略,以消除模型在处理左右空间关系时的偏见。最后,数据集中包含了常见和非常见视角的图像,要求模型在不同视角下保持稳定的三维空间推理能力,这对模型的泛化能力提出了更高的要求。
常用场景
经典使用场景
3DSRBench 数据集的经典使用场景在于评估和提升多模态模型(LMMs)在三维空间推理任务中的表现。该数据集通过2,772个手工标注的视觉问答对,涵盖了12种不同类型的三维空间推理问题,如高度、位置、方向和多对象推理等。这些任务旨在测试模型在处理复杂三维空间关系时的能力,尤其是在不同视角下的表现。
解决学术问题
3DSRBench 数据集解决了当前多模态模型在三维空间推理能力上的不足问题。尽管这些模型在图像和视频理解任务中表现出色,但在处理三维空间关系时仍存在显著局限,尤其是在高度、方向、位置和多对象推理等方面。该数据集通过提供多样化的三维空间推理任务,揭示了现有模型在这些方面的不足,并为未来研究提供了改进方向。
实际应用
3DSRBench 数据集的实际应用场景广泛,特别是在自动驾驶、机器人操作和增强现实(AR)/虚拟现实(VR)等领域。在这些应用中,模型需要具备强大的三维空间推理能力,以理解和处理复杂的三维场景。例如,自动驾驶系统需要准确判断物体在三维空间中的位置和方向,以确保安全导航;机器人操作则依赖于对三维空间关系的精确理解,以完成复杂的任务。
数据集最近研究
最新研究方向
3DSRBench数据集的最新研究方向主要集中在提升多模态模型(LMMs)在三维空间推理能力上的表现。研究者们通过引入2,772个人工标注的视觉问答对,涵盖12种问题类型,旨在全面评估模型在高度、位置、方向及多对象推理等方面的三维空间理解能力。特别值得注意的是,研究还关注了相机视角对模型表现的影响,通过引入常见与不常见视角的对比,揭示了现有模型在处理不常见视角时的性能下降问题。这一研究不仅为未来LMMs在三维空间推理能力的发展提供了宝贵的见解,还为自动驾驶、机器人操作等依赖三维空间理解的下游任务奠定了基础。
相关研究论文
- 13DSRBench: A Comprehensive 3D Spatial Reasoning Benchmark约翰斯·霍普金斯大学, 卡内基梅隆大学, DEVCOM陆军研究实验室 · 2024年
以上内容由遇见数据集搜集并总结生成


