OPV2V 协同感知数据集
收藏超神经2022-09-12 更新2024-05-15 收录
下载链接:
https://hyper.ai/cn/datasets/20181
下载链接
链接失效反馈官方服务:
资源简介:
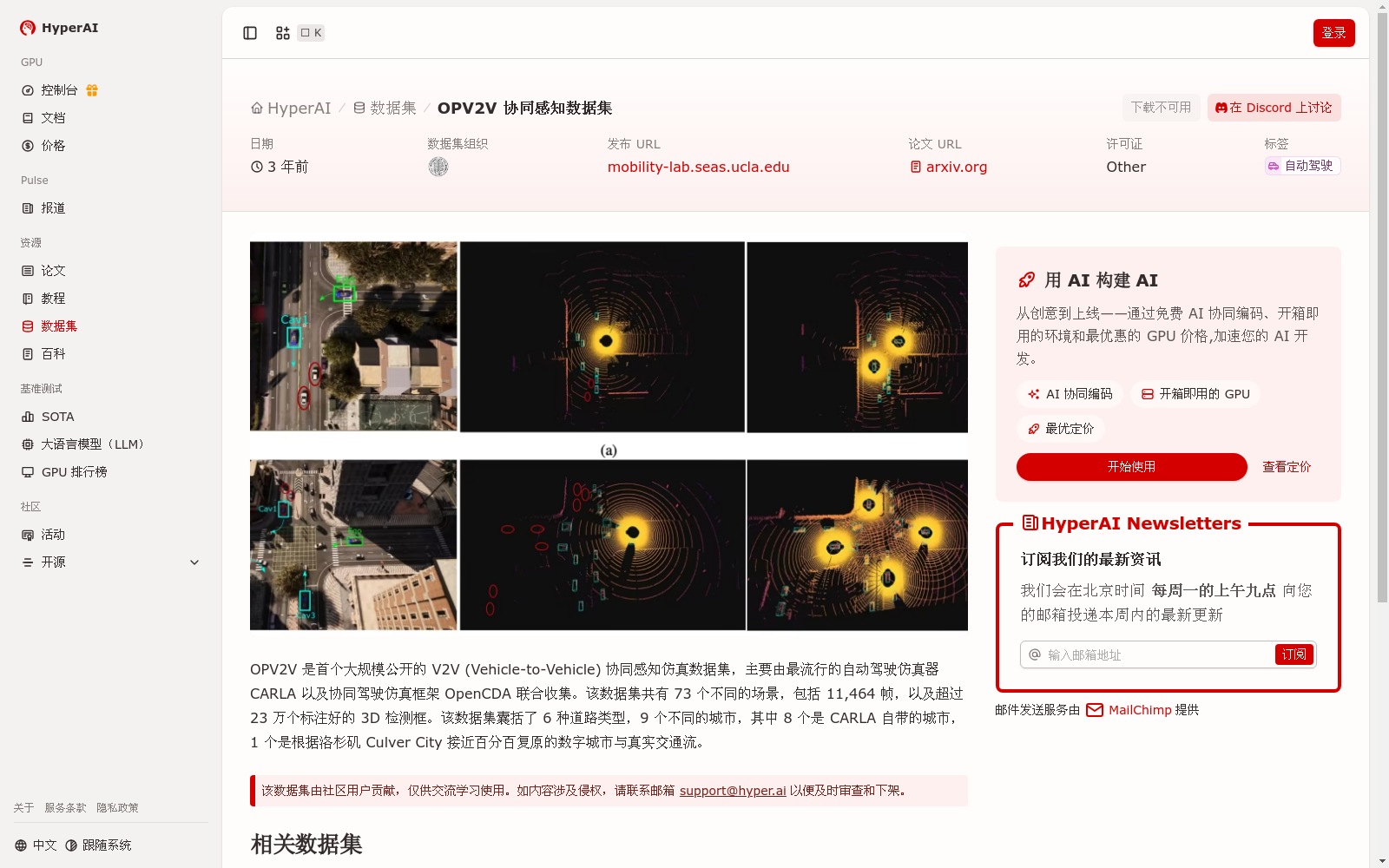
OPV2V 是首个大规模公开的 V2V (Vehicle-to-Vehicle) 协同感知仿真数据集,主要由最流行的自动驾驶仿真器 CARLA 以及协同驾驶仿真框架 OpenCDA 联合收集。该数据集共有 73 个不同的场景,包括 11,464 帧,以及超过 23 万个标注好的 3D 检测框。该数据集囊括了 6 种道路类型,9 个不同的城市,其中 8 个是 CARLA 自带的城市,1 个是根据洛杉矶 Culver City 接近百分百复原的数字城市与真实交通流。
OPV2V is the first large-scale publicly available Vehicle-to-Vehicle (V2V) collaborative perception simulation dataset, jointly collected by CARLA, the most popular autonomous driving simulator, and OpenCDA, a collaborative driving simulation framework. This dataset contains 73 distinct scenarios, totaling 11,464 frames and over 230,000 annotated 3D detection bounding boxes. It covers 6 types of roadways and 9 distinct cities, 8 of which are native to CARLA, while the remaining one is a digital city paired with realistic traffic flows that are nearly 100% restored based on Culver City, Los Angeles.
创建时间:
2022-09-12
搜集汇总
数据集介绍
背景与挑战
背景概述
OPV2V是首个大规模公开的V2V协同感知仿真数据集,使用CARLA和OpenCDA联合收集,包含73个场景、11,464帧和超过23万个3D检测框标注,覆盖6种道路类型和9个不同城市。
以上内容由遇见数据集搜集并总结生成


