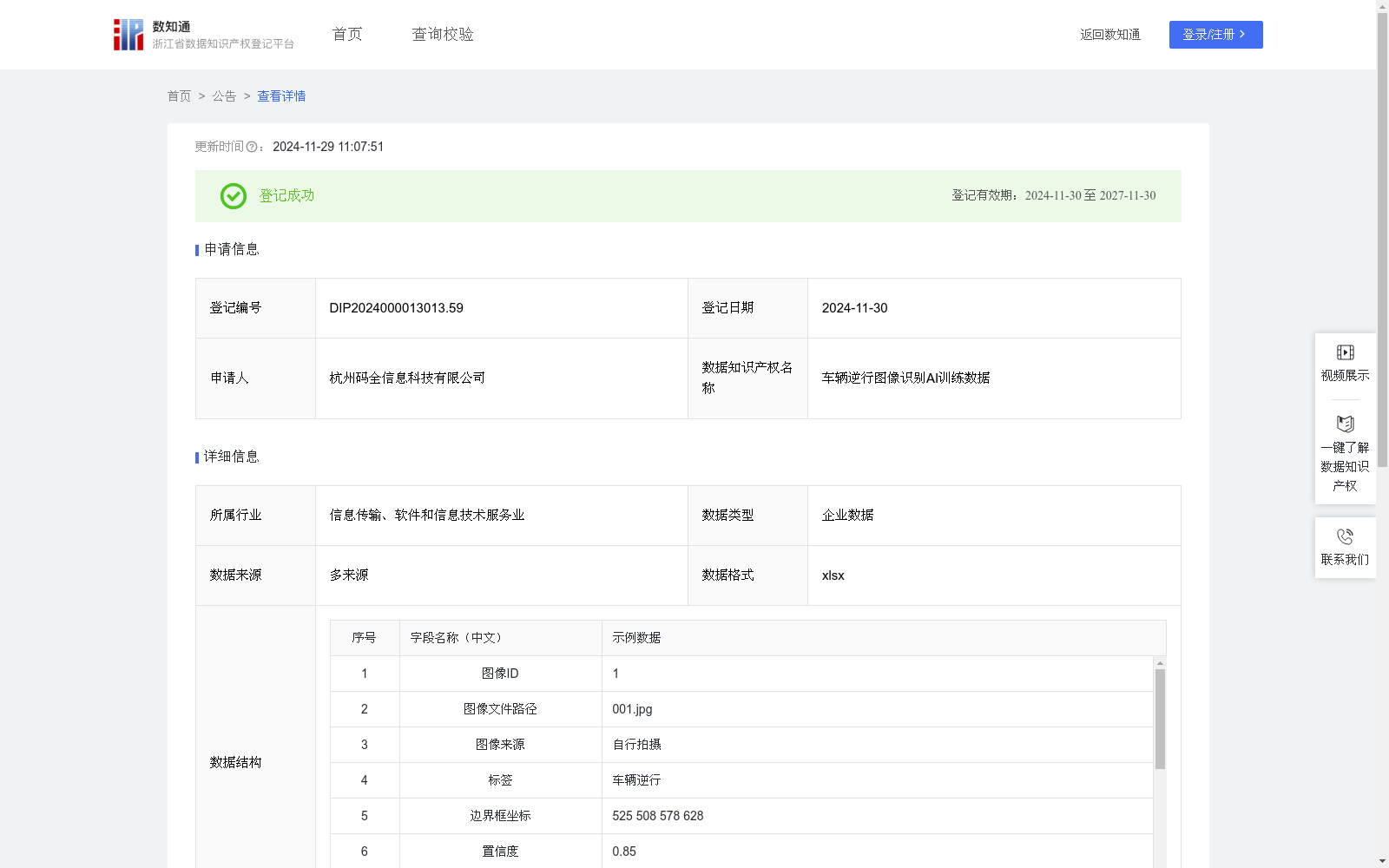
车辆逆行图像识别AI训练数据
收藏浙江省数据知识产权登记平台2024-11-29 更新2024-11-30 收录
下载链接:
https://www.zjip.org.cn/home/announce/trends/91250
下载链接
链接失效反馈官方服务:
资源简介:
车辆逆行图像识别AI训练数据的应用场景主要包括提升AI模型在实际场景中对车辆逆行行为的识别能力和识别准确度。通过这些数据的训练,AI模型可以更准确地识别出车辆是否逆行,从而胜任在交通监控系统、道路安全分析、交通违规执法等领域的应用。此外,训练数据的应用进一步提升了模型的泛化能力和鲁棒性,使得AI模型在处理室外不同光照、天气和背景条件下的车辆逆行图像时,具有更好的泛化能力和适应性。步骤1,原始图像数据来源于公开图像数据库、自行拍摄或其他算法生成。在此步骤中,记录每张图像的图像ID和图像文件路径。
步骤2,根据自身项目需求和模型要求,将车辆逆行图像数据分类成数据集类型,分为训练集和测试集。对训练集图像进行标注,包括标签和边界框坐标。
步骤3,选择适合车辆逆行图像识别的YOLO预训练模型,并初始化模型参数。设置合理的超参数,如学习率、批量大小等,以优化模型的训练过程。记录所使用的模型名称和这些超参数。
步骤4,使用PyTorch深度学习框架加载和初始化模型。将准备好的数据集输入到模型中进行训练。在训练过程中,模型会不断调整权重,以最小化预测框与真实框之间的差值。记录训练的训练时长和训练周期(迭代次数)。训练过程中,模型的置信度将逐渐提升。
步骤5,在训练完成后,使用测试集对模型进行评估。计算模型在不同场景下的精度、召回率、F1分数、以及实时性能评估等性能指标,确保模型的准确性和鲁棒性。
步骤6,将最终训练、测试后得到的模型应用到具体的项目中。在实际应用中,评估模型的实时性能,包括检测的准确性和处理速度,确保满足项目需求。记录模型在实际应用中的实时性能评估。
The application scenarios of AI training data for vehicle retrograde driving image recognition mainly focus on enhancing the recognition capability and accuracy of AI models in identifying vehicle retrograde driving behaviors in real-world scenarios.
Through training with this dataset, the AI model can more accurately determine whether a vehicle is driving retrogradely, enabling its deployment in applications such as traffic monitoring systems, road safety analysis, and traffic violation law enforcement.
Additionally, the utilization of this training data further enhances the model's generalization ability and robustness, allowing the AI model to exhibit stronger generalization and adaptability when handling vehicle retrograde driving images under diverse outdoor lighting, weather, and background conditions.
Step 1: The original image data is sourced from public image databases, self-shot materials, or generated by other algorithms. During this step, the image ID and file path of each image are recorded.
Step 2: Classify the vehicle retrograde driving image data into dataset types (training set and test set) based on project requirements and model specifications. Annotate the images in the training set, including labels and bounding box coordinates.
Step 3: Select a pre-trained YOLO model suitable for vehicle retrograde driving image recognition, and initialize the model parameters. Set reasonable hyperparameters such as learning rate and batch size to optimize the model's training process. Record the name of the used model and these hyperparameters.
Step 4: Use the PyTorch deep learning framework to load and initialize the model. Input the prepared dataset into the model for training. During the training process, the model will continuously adjust its weights to minimize the difference between predicted bounding boxes and ground-truth bounding boxes. Record the training duration and training epochs (number of iterations). The model's confidence will gradually increase throughout the training process.
Step 5: After the training is completed, evaluate the model using the test set. Calculate performance metrics such as precision, recall, F1-score, and real-time performance evaluation of the model under different scenarios to ensure the model's accuracy and robustness.
Step 6: Deploy the final model obtained through training and testing into specific projects. In practical applications, evaluate the model's real-time performance, including detection accuracy and processing speed, to ensure it meets project requirements. Record the real-time performance evaluation results of the model in practical applications.
提供机构:
杭州码全信息科技有限公司
创建时间:
2024-11-11
搜集汇总
数据集介绍
特点
该数据集包含5724条车辆逆行图像数据,用于训练YOLOv10模型,提升AI在交通监控等场景中的逆行识别能力。数据格式为xlsx,涵盖图像ID、标签、边界框坐标等字段,并通过多步骤算法流程优化模型性能。
以上内容由遇见数据集搜集并总结生成


