GEMBench
收藏Hugging Face2025-02-10 更新2025-02-11 收录
下载链接:
https://huggingface.co/datasets/rjgpinel/GEMBench
下载链接
链接失效反馈官方服务:
资源简介:
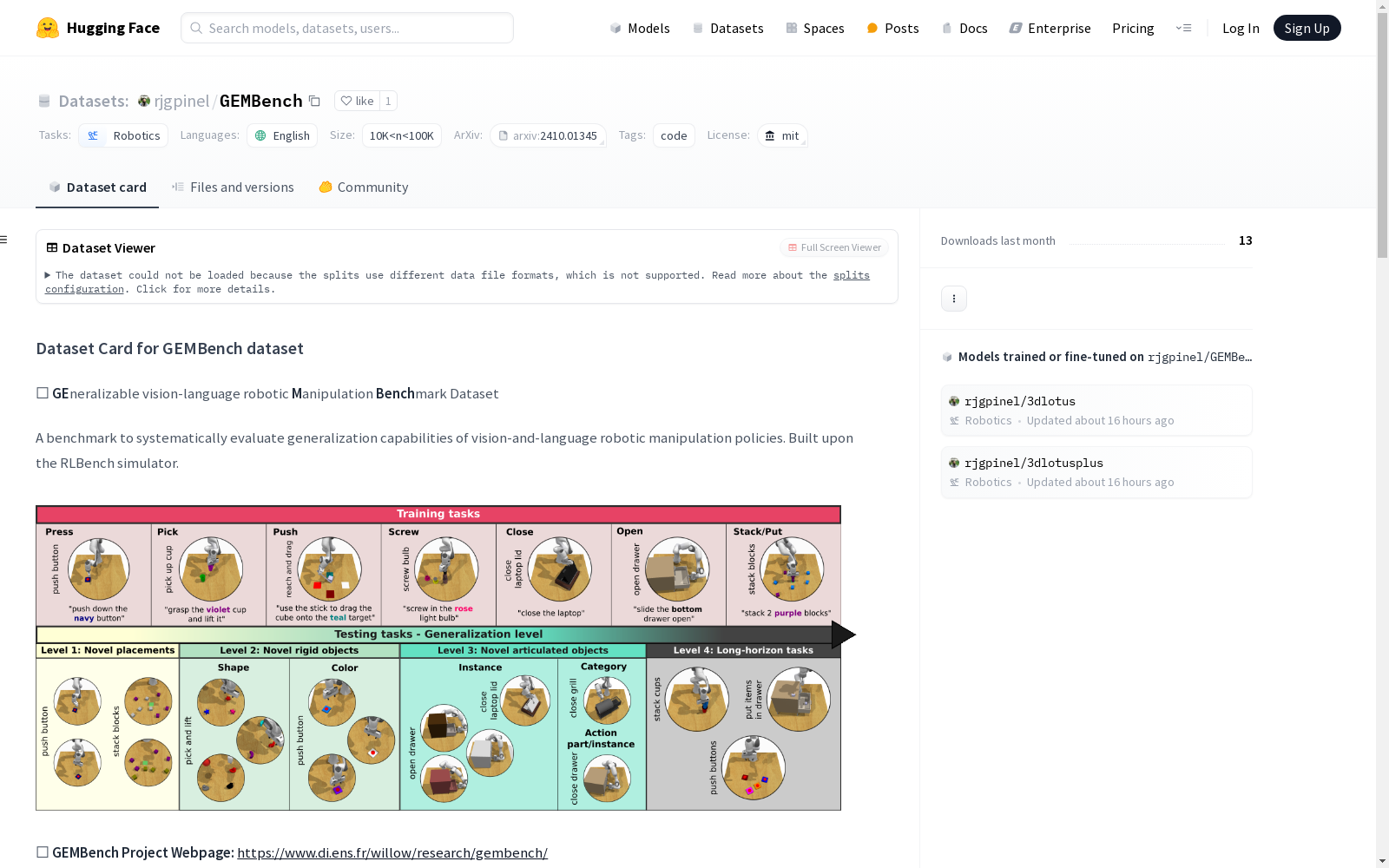
GEMBench数据集是一个泛化视觉语言机器人操作能力的评估基准。它基于RLBench模拟器,包含了用于训练、验证和测试的微步骤初始配置、关键步骤bounding box数据、点云数据等。该数据集旨在系统性地评估机器人操作策略在视觉和语言任务上的泛化能力。
创建时间:
2025-02-09
搜集汇总
数据集介绍
构建方式
GEMBench数据集是基于RLBench模拟器构建的,旨在系统评估视觉与语言机器人操作策略的泛化能力。该数据集包含了567M个微步骤的初始配置,以及用于训练3D-LOTUS和3D-LOTUS++运动规划器的关键步骤数据,涉及了大量的点云处理和文本编码工作。
特点
GEMBench数据集涵盖了机器人操作领域,其特色在于提供了丰富的视觉与语言交互数据,以及针对不同阶段的微步骤和关键步骤数据。数据集分为训练集、验证集和测试集,每一部分都包含了不同大小的初始配置和点云数据,确保了数据集的多样性和泛化能力评估的全面性。
使用方法
使用GEMBench数据集首先需要创建并激活conda环境,然后安装RLBench和相关依赖。用户可以通过官方提供的 leaderboard 查看当前的最佳性能,并通过指定的代码库进行模型的评估。引用该数据集时,需按照提供的BibTeX格式进行正确引用。
背景与挑战
背景概述
GEMBench数据集,全称为Generalizable vision-language robotic Manipulation Benchmark Dataset,是一个旨在系统评估视觉与语言机器人操作策略泛化能力的基准数据集。该数据集构建于RLBench模拟器之上,由Ricardo Garcia、Shizhe Chen和Cordelia Schmid等研究人员开发,并于2025年发布于IEEE国际机器人与自动化会议(ICRA)。GEMBench数据集的创建,是为了推动机器人操作在视觉与语言融合领域的发展,提供一个统一的评估标准,进而促进相关技术的进步与应用。该数据集在机器人学领域具有显著的影响力,为研究机器人操作策略提供了重要的实验基础。
当前挑战
GEMBench数据集在构建过程中,面临了多方面的挑战。首先,如何确保数据集能够全面覆盖各种操作场景,以便评估策略的泛化能力,是一个关键问题。其次,数据集的构建不仅需要大量高质量的视觉与语言数据,还需结合复杂的机器人操作环境,这对数据采集与处理提出了极高的要求。此外,在评估过程中,如何设计合理的评价指标和测试流程,以确保不同策略之间的比较是公正和有效的,也是一项重要挑战。
常用场景
经典使用场景
GEMBench数据集作为一项通用性的视觉语言机器人操作基准,其经典使用场景在于评估机器人操作策略在面对多样化任务时的泛化能力。该数据集依托RLBench模拟器构建,提供了丰富的初始配置和关键步骤数据,以便研究者能够深入探索机器人如何在视觉和语言指导下执行复杂的操作任务。
衍生相关工作
基于GEMBench数据集,衍生出了一系列相关的研究工作,包括3D-LOTUS和3D-LOTUS++等运动规划算法。这些工作不仅提升了机器人操作的精确度和效率,而且在视觉语言理解、场景建模等方面取得了显著进展,为机器人领域带来了新的研究视角和技术突破。
数据集最近研究
最新研究方向
GEMBench数据集作为评估视觉语言机器人操作策略泛化能力的一个基准,其研究焦点集中在如何提升机器人对复杂任务场景的适应性和泛化能力。近期研究倾向于利用该数据集探究深度学习模型,特别是大型语言模型(LLM)在机器人操作任务中的应用。研究者们通过GEMBench中的大规模模拟环境,对3D-LOTUS和3D-LOTUS++等模型进行训练和评估,以期达到对机器人操作指令的高效理解和准确执行。这些研究不仅推动了机器人技术在真实世界应用中的进步,也为视觉语言理解的跨领域融合提供了新的视角和数据支持。
以上内容由遇见数据集搜集并总结生成


