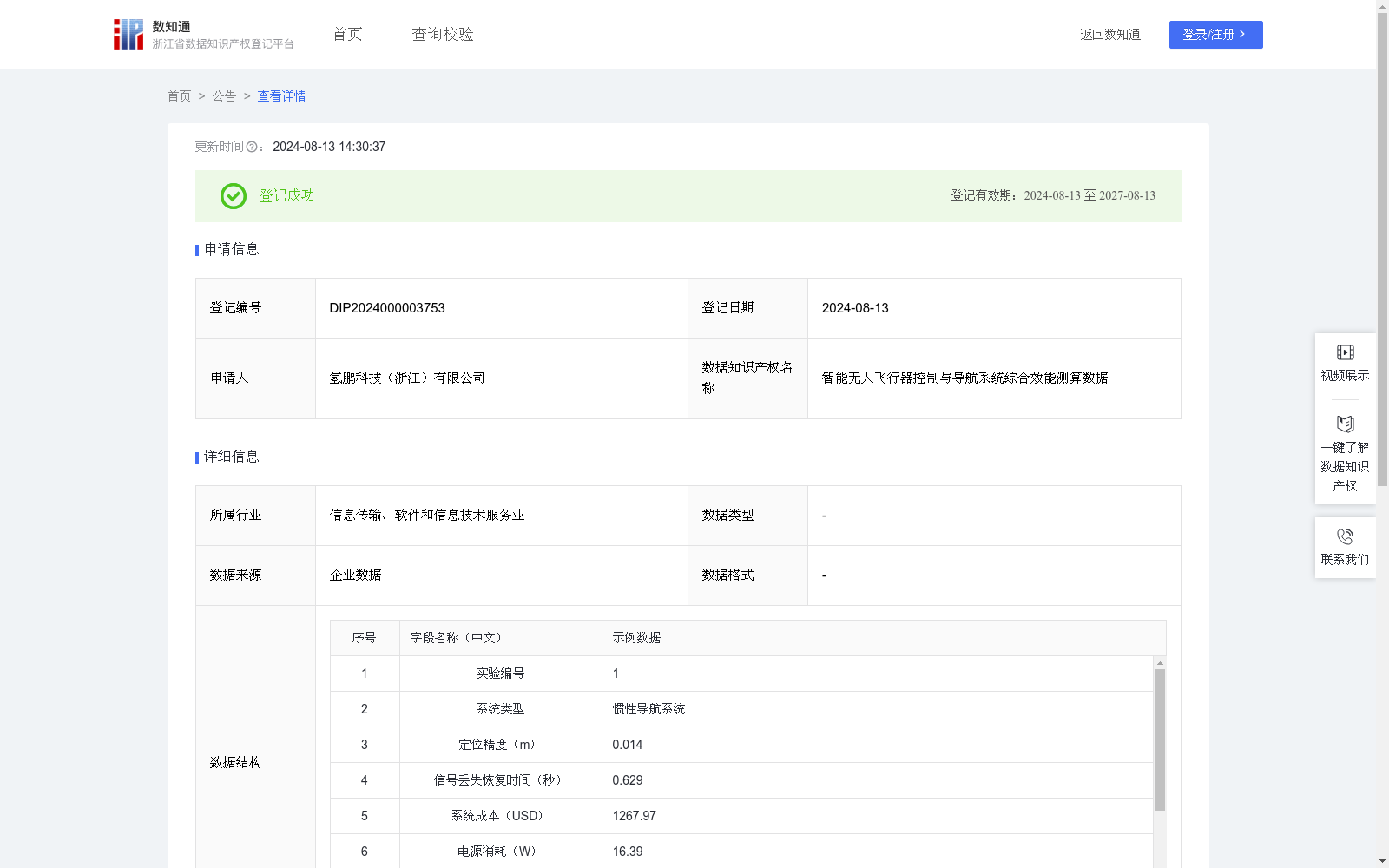
智能无人飞行器控制与导航系统综合效能测算数据
收藏浙江省数据知识产权登记平台2024-08-13 更新2024-08-14 收录
下载链接:
https://www.zjip.org.cn/home/announce/trends/50215
下载链接
链接失效反馈官方服务:
资源简介:
通过智能无人飞行器控制与导航系统的实验数据及综合效能分析,可以帮助用户在不同应用场景中选择最适合的系统。GNSS导航系统适用于高精度、高速度、长航程和高抗风能力需求的场景,但其高成本和高功耗需要在预算和电源有限的场合中慎重考虑。而惯性导航系统则在成本和能耗方面具有优势,适用于低成本和低功耗需求的任务。根据具体需求选择合适的系统,可以确保无人飞行器在不同场景下的最佳表现,对该相关企业的相关设备采购工作提供参考价值。算法规则包括:1.数据采集:实验数据来自对不同类型导航系统(惯性导航系统和GNSS导航系统)在各种性能参数上的测试。2.数据处理:清洗:处理缺失值、异常值和不一致的数据,确保数据的完整性和准确性。标准化:对各性能参数进行标准化处理,使不同尺度的数据可以进行综合比较。标准化方法采用最小-最大标准化,将数据值转换到0到1之间。3.综合效能计算:公式:综合效能=(定位精度×0.2)+(信号恢复时间×0.15)+(系统成本×0.15)+(电源消耗×0.1)+(数据传输速率×0.1)+(最大飞行速度×0.15)+(最大航程×0.1)+(抗风能力×0.05)(定位精度×0.2)+(信号恢复时间×0.15)+(系统成本×0.15)+(电源消耗×0.1)+(数据传输速率×0.1)+(最大飞行速度×0.15)+(最大航程×0.1)+(抗风能力×0.05)(定位精度×0.2)+(信号恢复时间×0.15)+(系统成本×0.15)+(电源消耗×0.1)+(数据传输速率×0.1)+(最大飞行速度×0.15)+(最大航程×0.1)+(抗风能力×0.05)。帮助用户根据具体需求选择合适的导航系统,提高无人机的效能。
提供机构:
氢鹏科技(浙江)有限公司
创建时间:
2024-07-22
搜集汇总
数据集介绍
特点
该数据集包含502条智能无人飞行器控制与导航系统的实验数据,涵盖11个关键性能参数,用于综合效能分析,帮助用户根据不同需求选择适合的导航系统。数据集每年更新,适用于信息传输、软件和信息技术服务业,主要应用于无人飞行器的设备采购和性能优化场景。
以上内容由遇见数据集搜集并总结生成


