3DOCT 6DoF Pose Dataset
收藏github2023-12-13 更新2024-05-31 收录
下载链接:
https://github.com/mlaves/3doct-pose-dataset
下载链接
链接失效反馈官方服务:
资源简介:
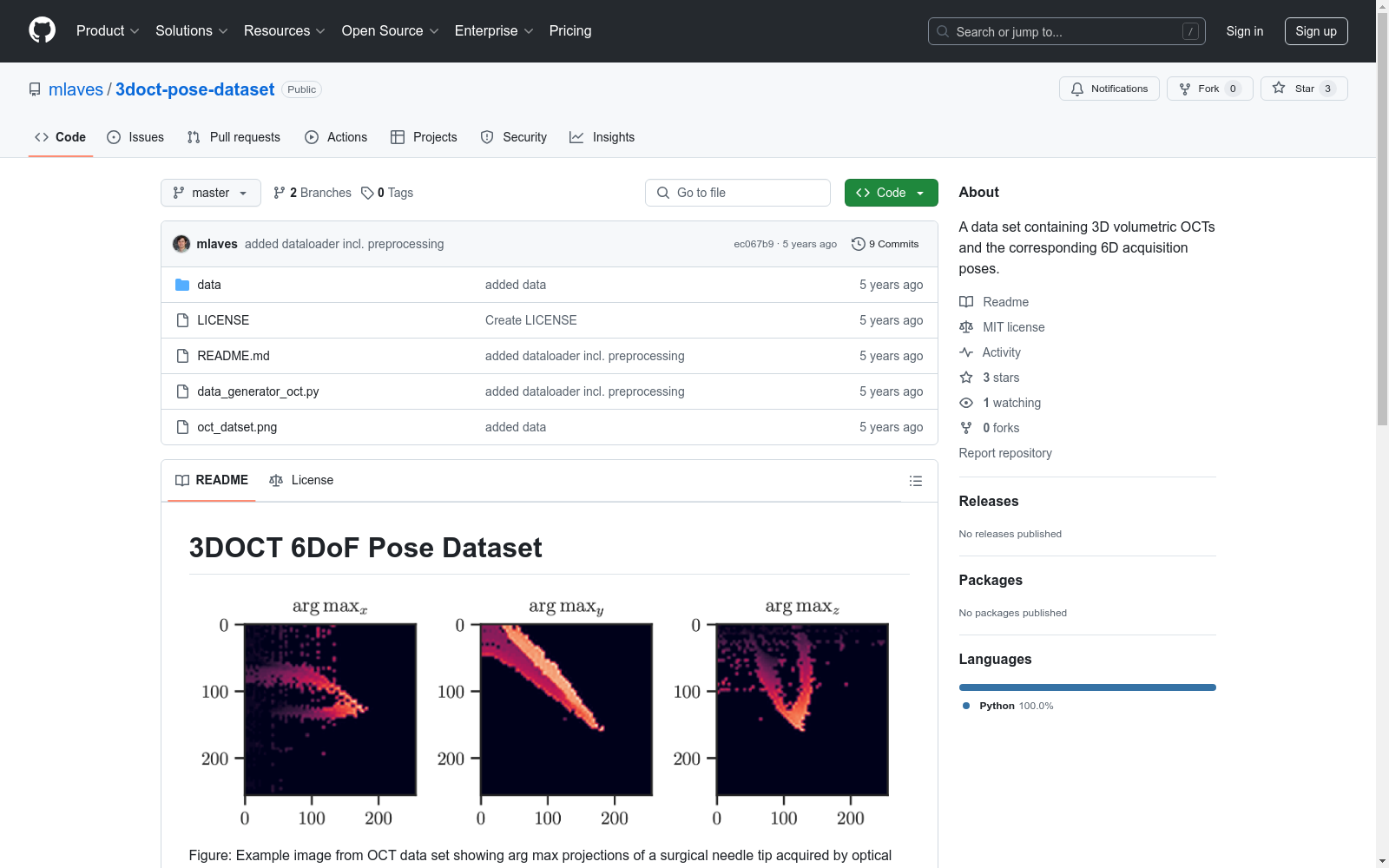
该数据集由将手术针连接到高精度六轴六足机器人(H-826,Physik Instrumente GmbH & Co. KG,德国)上,并通过3D光学相干断层扫描(OCS1300SS,Thorlabs Inc.,美国)观察针尖创建。数据集包含5,000次OCT采集,具有64×64×512体素,覆盖约3×3×3 mm的体积。每次采集都在不同的机器人配置下进行,并标有相应的6DoF姿态。数据具有大量的散斑噪声,这是光学相干断层扫描中的典型现象。
This dataset was created by attaching a surgical needle to a high-precision six-axis hexapod robot (H-826, Physik Instrumente GmbH & Co. KG, Germany) and observing the needle tip through 3D optical coherence tomography (OCS1300SS, Thorlabs Inc., USA). The dataset comprises 5,000 OCT acquisitions, each with a voxel size of 64×64×512, covering a volume of approximately 3×3×3 mm. Each acquisition was performed under different robot configurations and is labeled with the corresponding 6DoF pose. The data exhibits significant speckle noise, a typical phenomenon in optical coherence tomography.
创建时间:
2020-05-28
原始信息汇总
3DOCT 6DoF Pose Dataset 概述
数据集描述
- 创建方式:通过将手术针固定在精密六轴六足机器人(H-826, Physik Instrumente GmbH & Co. KG, Germany)上,并使用3D光学相干断层扫描技术(OCS1300SS, Thorlabs Inc., USA)观察针尖。
- 数据组成:包含5,000次光学相干断层扫描采集,每个采集具有64×64×512体素,覆盖约3×3×3 mm的体积。
- 数据特点:每次采集都是在不同的机器人配置下进行,并标记了相应的6自由度(6DoF)姿态。数据集具有大量的散斑噪声,这是光学相干断层扫描中的典型现象。
数据使用
-
数据加载:可以使用Python代码加载数据集,具体代码示例如下: python import numpy as np
f = np.load("1565077565.9816186.npz") img = f[data] pos = f[pos] img = img.transpose(2, 0, 1) # 调整数据顺序以符合FORTRAN顺序
-
数据预处理:PyTorch数据加载器及预处理代码可在文件
data_generator_oct.py中找到。
引用信息
若使用此数据集,请引用以下文献:
- Laves, MH., Ihler, S., Fast, JF., Kahrs, LA., Ortmaier, T. Well-Calibrated Regression Uncertainty in Medical Imaging with Deep Learning. Medical Imaging with Deep Learning (MIDL), 2020.
搜集汇总
数据集介绍
构建方式
3DOCT 6DoF Pose Dataset的构建基于高精度的六轴六足机器人(H-826,Physik Instrumente GmbH & Co. KG,德国)与三维光学相干断层扫描技术(OCS1300SS,Thorlabs Inc.,美国)的结合。研究人员将手术针固定在机器人上,并通过光学相干断层扫描观察针尖的位置变化。数据集包含5000次OCT采集,每次采集生成64×64×512体素的三维图像,覆盖约3×3×3毫米的体积范围。每个采集点对应不同的机器人配置,并标注了相应的六自由度姿态信息。
特点
该数据集的特点在于其高精度的六自由度姿态标注以及光学相干断层扫描图像中典型的散斑噪声。散斑噪声是光学相干断层扫描中的常见现象,增加了数据处理的复杂性。数据集中的图像具有较高的分辨率,能够精确捕捉手术针的微小位置变化,为医学图像分析提供了丰富的信息。此外,数据集的构建方式确保了每个采集点的姿态信息与图像数据的高度一致性,为深度学习模型的训练提供了可靠的基础。
使用方法
使用3DOCT 6DoF Pose Dataset时,可以通过Python代码加载数据文件。数据以.npz格式存储,包含图像数据和对应的姿态信息。用户可以使用NumPy库读取数据,并通过转置操作调整图像的维度顺序。此外,数据集中还提供了PyTorch数据加载器的实现,包括数据预处理步骤,便于用户直接应用于深度学习模型的训练与验证。通过该数据集,研究人员可以开发高精度的姿态估计模型,并探索光学相干断层扫描图像中的噪声处理技术。
背景与挑战
背景概述
3DOCT 6DoF Pose Dataset是由德国汉诺威莱布尼茨大学Mechatronic Systems研究所的Max-Heinrich Laves等人于2020年创建的医学影像数据集。该数据集旨在通过光学相干断层扫描(OCT)技术捕捉手术针尖的三维姿态信息,并结合高精度六轴机器人系统生成6自由度(6DoF)姿态标签。数据集包含5000个OCT采集样本,每个样本由64×64×512体素组成,覆盖约3×3×3毫米的体积。该数据集为医学影像领域的深度学习模型提供了高精度的姿态估计基准,尤其在手术导航和机器人辅助手术中具有重要应用价值。
当前挑战
3DOCT 6DoF Pose Dataset的构建与应用面临多重挑战。首先,光学相干断层扫描技术固有的散斑噪声对数据质量造成显著影响,增加了姿态估计的难度。其次,6自由度姿态标签的生成依赖于高精度机器人系统的校准与同步,任何微小的误差都会导致标签的不准确性。此外,数据集的规模虽大,但其空间分辨率有限,可能限制模型在复杂场景下的泛化能力。在应用层面,如何设计鲁棒的深度学习模型以应对噪声干扰并实现高精度姿态估计,是该数据集解决的核心领域问题。
常用场景
经典使用场景
3DOCT 6DoF Pose Dataset在医学影像领域中被广泛应用于手术针尖的六自由度姿态估计。通过高精度的六轴机器人系统与光学相干断层扫描技术结合,该数据集提供了大量带有精确姿态标签的三维图像数据,为深度学习模型在医学影像中的姿态估计任务提供了丰富的训练和验证资源。
衍生相关工作
基于3DOCT 6DoF Pose Dataset,研究人员已经开展了多项经典工作,例如开发基于深度学习的姿态估计模型,探索光学相干断层扫描图像中的噪声抑制方法,以及研究手术导航系统中的实时姿态跟踪技术。这些工作不仅推动了医学影像分析领域的前沿研究,也为相关技术的实际应用奠定了坚实基础。
数据集最近研究
最新研究方向
在医学影像领域,3DOCT 6DoF Pose Dataset的发布为深度学习在手术导航和机器人辅助手术中的应用提供了重要支持。该数据集通过高精度的六轴机器人结合光学相干断层扫描技术,生成了包含5000个样本的6自由度姿态数据,为研究手术针尖的精确定位和姿态估计提供了丰富的实验基础。近年来,随着深度学习在医学影像中的广泛应用,该数据集被用于探索基于深度学习的姿态回归模型,尤其是在高噪声环境下的鲁棒性研究。相关研究不仅推动了手术机器人的智能化发展,还为医学影像中的不确定性校准提供了新的思路,具有重要的临床应用价值。
以上内容由遇见数据集搜集并总结生成


