Ground Mobile Robot Perception Dataset
收藏数据集概述
名称: Ground Mobile Robot Perception Dataset
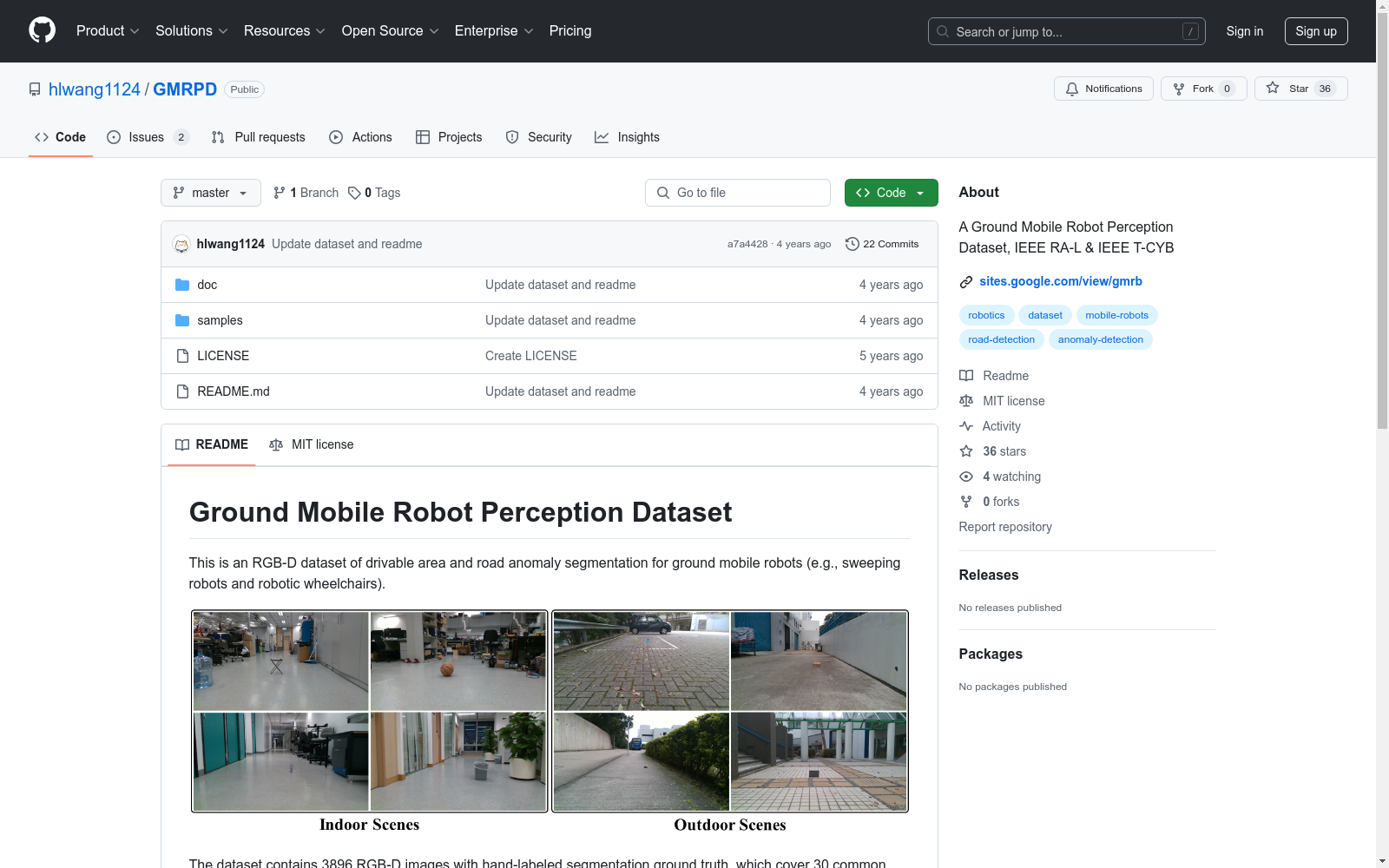
描述: 该数据集包含3896张RGB-D图像,用于地面移动机器人(如清扫机器人和机器人轮椅)的可行驶区域和道路异常分割。数据集覆盖了30个常见场景和18种不同类型的道路异常。
图像类型:
- RGB图像
- 归一化深度图像
- 原始深度图像
- 分割标签
图像分辨率: 1280 x 720像素
存储结构:
rgb: RGB图像depth_u8: 归一化深度图像depth_u16: 原始深度图像label: 分割标签
下载链接: 数据集可通过Google Drive或Lab NAS下载。
注意事项: 由于RealSense D415相机采集的深度图像两侧存在无效像素,建议在使用前进行裁剪。
引用信息:
@article{wang2021dynamic, title = {Dynamic fusion module evolves drivable area and road anomaly detection: A benchmark and algorithms}, author = {Wang, Hengli and Fan, Rui and Sun, Yuxiang and Liu, Ming}, journal = {IEEE Transactions on Cybernetics}, year = {2021}, publisher = {IEEE}, doi = {10.1109/TCYB.2021.3064089} }
@article{wang2019self, title = {Self-supervised drivable area and road anomaly segmentation using {RGB-D} data for robotic wheelchairs}, author = {Wang, Hengli and Sun, Yuxiang and Liu, Ming}, journal = {IEEE Robotics and Automation Letters}, volume = {4}, number = {4}, pages = {4386--4393}, year = {2019}, publisher = {IEEE}, doi = {10.1109/LRA.2019.2932874} }