牛津越野雷达数据集 (OORD)
收藏arXiv2024-03-05 更新2024-07-23 收录
下载链接:
https://oxford-robotics-institute.github.io/oord-dataset/
下载链接
链接失效反馈官方服务:
资源简介:
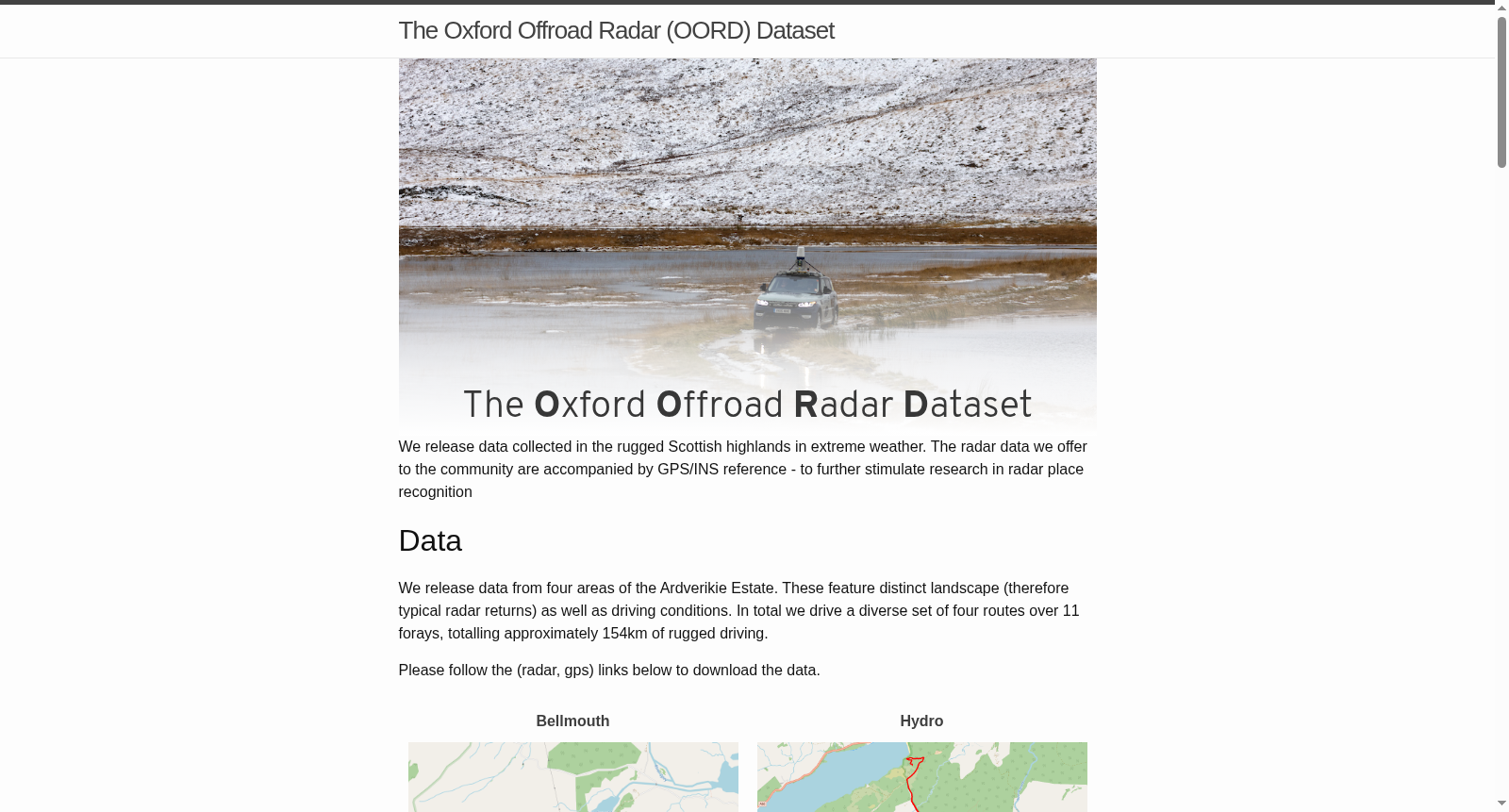
牛津越野雷达数据集(OORD)是由牛津机器人研究所创建,专注于越野和自然环境的雷达数据收集。该数据集包含超过90GiB的雷达扫描数据,以及GPS和IMU读数,覆盖约154公里的越野驾驶。数据集的创建过程涉及在苏格兰高地极端天气条件下进行的数据收集,旨在支持自主车辆定位和场景理解的研究。OORD数据集的应用领域包括自主车辆导航、定位和地图构建,特别是在恶劣天气和光照条件下的应用。
The Oxford Off-Road Radar Dataset (OORD) was developed by the Oxford Robotics Institute, focusing on radar data collection in off-road and natural environments. This dataset contains over 90 GiB of radar scan data, along with GPS and IMU readings, covering approximately 154 kilometers of off-road driving. Its data collection was conducted under extreme weather conditions in the Scottish Highlands, with the goal of supporting research on autonomous vehicle localization and scene understanding. Application domains of the OORD dataset include autonomous vehicle navigation, localization and mapping, particularly for scenarios under adverse weather and lighting conditions.
提供机构:
牛津机器人研究所
创建时间:
2024-03-05
搜集汇总
数据集介绍
构建方式
在毫米波雷达感知技术日益受到学术界与工业界关注的背景下,牛津越野雷达数据集(OORD)的构建旨在填补自然崎岖环境下雷达数据集的空白。其构建过程系统性地在苏格兰高地的阿德弗里克庄园展开,涵盖了四条具有代表性的越野路线,总计完成11次数据采集行程,累计行驶里程约154公里。数据采集平台搭载了Navtech CTS350-X调频连续波雷达,以4Hz频率获取极坐标形式的原始扫描数据,探测距离达163米。同时,采用Microstrain 3DM-RQ1-45 GPS/INS系统提供精确的位姿参考真值,所有传感器数据均经过时间戳同步,最终形成超过90GiB的标准化数据集。
使用方法
该数据集主要服务于雷达地点重识别、定位与里程计等自动驾驶感知任务的研究与算法评测。研究者可通过项目官网获取数据加载工具包,该工具包提供了将原始极坐标雷达数据转换为笛卡尔坐标格式的功能,并集成了迭代式数据集类,便于将雷达扫描帧与对应的GPS/INS参考位姿进行配对使用。数据集中提供的GPS参考真值可用于构建地点匹配矩阵,支持以Recall@N等通用指标评估算法性能。项目同时开源了包括RaPlace、Open-RadVLAD及基于ResNet18-NetVLAD的神经网络在内的多种雷达地点重识别基线模型与预训练权重,用户可利用配套的配置文件快速在全部轨迹对上运行实验并进行性能比较。
背景与挑战
背景概述
毫米波扫描雷达在自动驾驶车辆定位与场景理解领域展现出日益增长的学术价值与商业潜力。牛津越野雷达数据集(OORD)由牛津大学机器人研究所于2024年发布,旨在填补现有雷达数据集多集中于城市或半城市场景的空白。该数据集聚焦于崎岖越野环境,在苏格兰高地的极端天气条件下采集,涵盖约154公里驾驶里程与超过90GiB的雷达扫描数据,并辅以GPS/INS参考信息。其核心研究问题在于推动雷达地点识别技术在自然复杂地形中的发展,为农业、搜救、资源勘探等越野自主系统应用提供关键数据支撑,对提升雷达在恶劣环境下的鲁棒性与泛化能力具有重要影响力。
当前挑战
在雷达地点识别领域,现有方法常面临复杂地形中特征稀疏性与动态环境干扰的挑战,例如长距离单调场景(如湖泊沿岸)导致雷达回波缺乏判别性特征,影响识别精度。数据集构建过程中,研究团队需克服极端天气(如厚积雪、黑暗环境)对数据采集一致性的影响,同时确保多路线重复遍历以提供充足的地面真值。此外,雷达数据固有的多径效应与噪声干扰,以及越野环境中非结构化道路带来的运动畸变,均为数据标注与算法验证增添了复杂性。
常用场景
经典使用场景
在自动驾驶与机器人导航领域,毫米波雷达因其在恶劣天气和低光照条件下的卓越鲁棒性而备受关注。牛津越野雷达数据集(OORD)专为雷达地点识别任务设计,其经典使用场景聚焦于在崎岖、非结构化的自然环境中评估和开发雷达定位算法。该数据集通过提供在苏格兰高地极端天气下采集的雷达扫描序列,结合高精度GPS/INS参考数据,为研究者构建了一个可靠的基准测试平台,用于验证雷达系统在复杂地形中的重定位性能。
解决学术问题
该数据集有效应对了雷达感知研究中的关键挑战,即缺乏针对越野环境的标准化数据资源。传统雷达数据集多集中于城市或半城市场景,难以涵盖自然地形中的独特感知难题,如多变的地表结构、稀疏的特征分布以及极端气象干扰。OORD通过提供涵盖多变地形、厚雪覆盖及全黑暗条件的雷达数据,填补了这一空白,促进了雷达地点识别、里程计估计以及同步定位与建图(SLAM)等核心学术方向的发展,为算法在真实世界中的泛化能力提供了实证基础。
实际应用
在现实应用中,牛津越野雷达数据集支撑的技术可广泛应用于依赖自主导航的越野作业场景。例如,在农业自动化中,无人拖拉机需在泥泞或积雪的田野中精准定位;在矿业勘探与资源开采中,自动驾驶卡车需在崎岖矿区内稳定运行;此外,该数据集亦适用于搜救任务中的无人机导航、偏远地区的环境监测以及灾害应急响应。其提供的雷达数据能够帮助开发出不受天气与光照限制的可靠定位系统,提升野外作业的安全性与效率。
数据集最近研究
最新研究方向
在毫米波雷达感知领域,牛津越野雷达数据集(OORD)的推出标志着研究重心正从结构化城市环境向复杂自然场景的迁移。该数据集聚焦于极端天气与崎岖地形下的雷达定位与场景理解,为自动驾驶在农业、救援等越野应用中的鲁棒性研究提供了关键支撑。前沿探索集中于雷达地点识别,通过对比学习、变换不变性积分变换及深度神经网络等方法,提升模型在恶劣条件下的泛化能力。相关热点包括开源雷达识别系统的集成与性能基准的建立,其影响在于推动了雷达SLAM技术在非结构化环境中的实用化进程,为多传感器融合与全天候自主导航奠定了数据基础。
相关研究论文
- 1OORD: The Oxford Offroad Radar Dataset牛津机器人研究所 · 2024年
以上内容由遇见数据集搜集并总结生成


