TAIL
收藏arXiv2024-03-25 更新2024-06-21 收录
下载链接:
https://tailrobot.github.io/
下载链接
链接失效反馈官方服务:
资源简介:
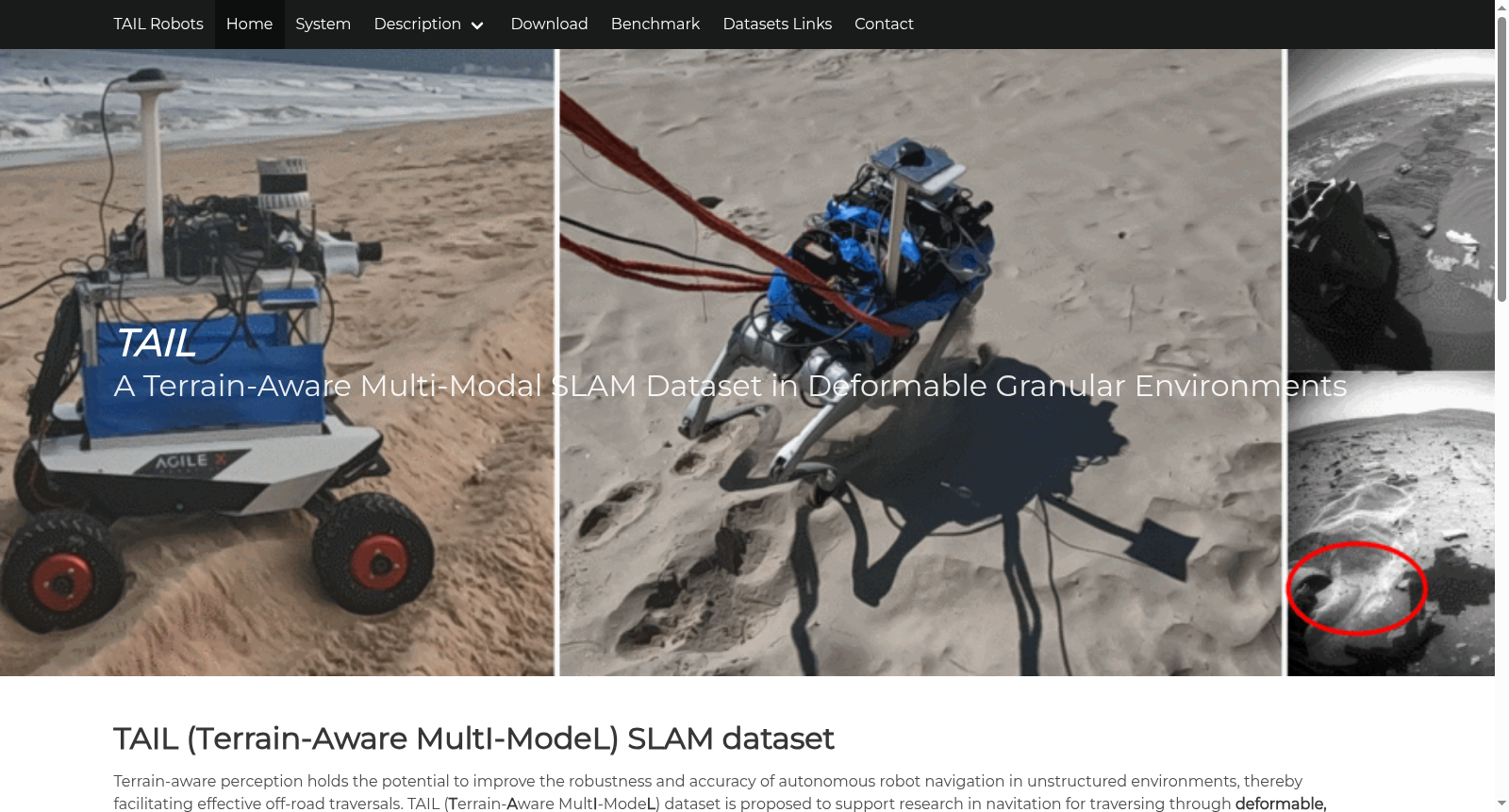
TAIL数据集是由南方科技大学和香港科技大学共同创建,专注于可变形颗粒环境的机器人运动地形感知多模态SLAM。该数据集包含14个序列,覆盖了从容易到难以穿越的多种沙质地形,通过轮式和四足机器人平台收集。数据集配备了多种传感器,如立体帧相机、多个地面指向RGB-D相机、旋转3D LiDAR、IMU和RTK设备,以捕捉丰富的非结构化场景。TAIL数据集旨在推动软地形中多传感器融合SLAM技术的发展,通过提供独特的异构本体感受和外感受挑战SLAM算法,增强机器人在复杂环境中的自主导航能力。
The TAIL Dataset was jointly developed by Southern University of Science and Technology (SUSTech) and The Hong Kong University of Science and Technology (HKUST), focusing on multimodal SLAM for robotic terrain perception in deformable granular environments. This dataset consists of 14 sequences covering various sandy terrains ranging from easily traversable to highly challenging, and was collected using both wheeled and quadruped robotic platforms. It is equipped with a variety of sensors, including stereo frame cameras, multiple ground-facing RGB-D cameras, a rotating 3D LiDAR, an Inertial Measurement Unit (IMU), and Real-Time Kinematic (RTK) devices, to capture rich unstructured scenes. The TAIL Dataset aims to advance the development of multi-sensor fusion SLAM technologies in soft terrain, and enhance robots' autonomous navigation capabilities in complex environments by providing unique heterogeneous proprioceptive and exteroceptive challenges for SLAM algorithms.
提供机构:
南方科技大学(SUSTech)深圳, 518055, 中国. 广东省高校人机增强与康复机器人重点实验室, SUSTech, 深圳, 518055, 中国. 香港科技大学(广州), 南沙, 广州, 511400, 广东, 中国.
创建时间:
2024-03-25
搜集汇总
数据集介绍
构建方式
在机器人自主导航领域,面对非结构化可变形地形时,多模态感知数据的融合对于提升同步定位与建图(SLAM)的鲁棒性至关重要。TAIL数据集的构建旨在填补这一研究空白,其通过集成一套硬件同步的多传感器套件,在双月湾的两个典型沙滩场景(山海里与万科)中系统性地采集数据。该套件包含立体帧相机、多个指向地面的RGB-D相机、旋转式3D激光雷达、惯性测量单元(IMU)以及实时动态载波相位差分(RTK)设备,所有传感器通过微控制器单元(MCU)实现毫秒级精度的硬件触发同步。数据采集过程同时采用了轮式与四足两种机器人平台,以涵盖平面平稳与平面颠簸两种截然不同的运动模式与地面交互特性,从而在纹理稀疏的松软颗粒环境中捕获了涵盖周围环境与地面特性的丰富序列。
使用方法
TAIL数据集以ROS数据包(rosbag)格式发布,便于研究者使用主流的机器人操作系统工具进行回放与处理。每个序列的数据包均以‘环境_日期’的格式命名,并附有对齐至激光雷达坐标系的地面真值轨迹文件。使用者可基于该数据集开发和评估各类SLAM算法,包括单目、视觉-惯性、激光雷达-惯性以及激光雷达-视觉-惯性等多传感器融合方案。数据集已用于对ORB-SLAM2、VINS-Fusion、A-LOAM、FAST-LIO2及FAST-LIVO等多种前沿算法的基准测试,其评估脚本与参数配置文件一同公开,为算法性能比较提供了统一框架。研究者可通过指定网站申请获取全部数据与资源,以推动复杂地形下多模态SLAM技术的创新与发展。
背景与挑战
背景概述
在机器人自主导航领域,复杂非结构化地形下的鲁棒定位与建图是长期存在的核心挑战。南方科技大学仿生机器人与智能系统实验室于近年提出了TAIL数据集,旨在填补可变形颗粒环境(如沙地)中多模态SLAM基准数据的空白。该数据集由硬件同步的多传感器套件采集,涵盖立体相机、多视角RGB-D相机、3D激光雷达、IMU及RTK设备,并创新性地融合了轮式与四足机器人两种运动模式下的本体感知数据。TAIL的创建推动了地形感知技术与多传感器融合SLAM算法的发展,为野外机器人导航在松软、纹理稀疏地形中的性能评估提供了关键实验平台。
当前挑战
TAIL数据集致力于解决可变形颗粒环境中机器人同步定位与建图的特殊难题,其核心挑战在于地形非几何特性(如沙地下陷、滑动)对传统SLAM特征提取与运动估计的干扰。具体而言,数据构建面临多重困难:松软沙地导致机器人运动剧烈抖动,引发视觉图像模糊与激光雷达点云畸变;纹理稀疏场景使得视觉特征匹配极易失效;多传感器在动态沙尘、光照变化下的数据同步与校准精度要求极高;同时,需精确采集轮式与四足机器人差异化的运动学数据以表征异构地形交互。这些挑战共同考验着多模态融合算法的鲁棒性与适应性。
常用场景
经典使用场景
在机器人导航与感知研究领域,TAIL数据集为多模态SLAM算法在可变形颗粒环境中的性能评估提供了标准化的测试平台。该数据集通过集成立体相机、多视角RGB-D相机、旋转式3D激光雷达、IMU及RTK设备,构建了硬件同步的多传感器套件,能够精确捕捉轮式与四足机器人在沙质地形中的动态交互过程。其经典应用场景聚焦于评估视觉-惯性、激光-惯性以及多模态融合SLAM算法在纹理稀疏、光照多变且存在动态干扰的软质地形中的定位与建图精度,为算法在非结构化环境中的鲁棒性验证提供了关键数据支撑。
解决学术问题
TAIL数据集主要解决了机器人学中多模态感知在可变形地形SLAM研究中的若干核心问题。传统SLAM数据集多集中于结构化或半结构化环境,缺乏对颗粒介质下机器人-地形交互特性的系统刻画。该数据集通过同步采集轮式与四足机器人在粗、细两种沙质地形中的运动序列,首次实现了对异质本体感知与外部感知的联合记录,为研究地形物理属性对定位漂移、传感器退化及运动估计的影响提供了实证基础。其意义在于填补了多机器人平台在软质地形中多传感器融合SLAM评估的数据空白,推动了地形感知技术与自主导航算法的协同发展。
实际应用
TAIL数据集的实际应用价值体现在多个前沿机器人领域。在行星探测任务中,该数据集模拟了火星车在沙质表面的运动场景,为探测器在松软地形中的自主避障与路径规划算法提供了地面验证数据。在野外救援与勘测机器人开发中,其包含的动态光照、移动物体及流沙干扰序列,可用于训练算法应对自然环境中的感知退化问题。此外,数据集记录的机器人足端-地形交互数据,为足式机器人的步态优化与地形自适应控制策略研究提供了关键输入,提升了机器人在复杂户外环境中的运动可靠性与能量效率。
数据集最近研究
最新研究方向
在机器人自主导航领域,针对非结构化可变形地形环境的多模态SLAM技术正成为研究前沿。TAIL数据集聚焦于沙质等颗粒状可变形地形,通过集成轮式与四足机器人平台,结合立体相机、多视角RGB-D相机、3D激光雷达、IMU及RTK设备,首次系统性地捕捉了机器人-地形动态交互的异质本体感知信息。该数据集推动了多传感器融合SLAM在纹理稀疏、光照多变、地形力学特性复杂的野外环境中的算法验证与性能基准测试,尤其关注地形感知技术在提升导航鲁棒性与准确性方面的关键作用。相关研究正探索如何利用多模态数据增强对可变形地形动态特性的理解,并为野外机器人自主穿越提供可靠的感知解决方案。
相关研究论文
- 1TAIL: A Terrain-Aware Multi-Modal SLAM Dataset for Robot Locomotion in Deformable Granular Environments南方科技大学(SUSTech)深圳, 518055, 中国. 广东省高校人机增强与康复机器人重点实验室, SUSTech, 深圳, 518055, 中国. 香港科技大学(广州), 南沙, 广州, 511400, 广东, 中国. · 2024年
以上内容由遇见数据集搜集并总结生成


