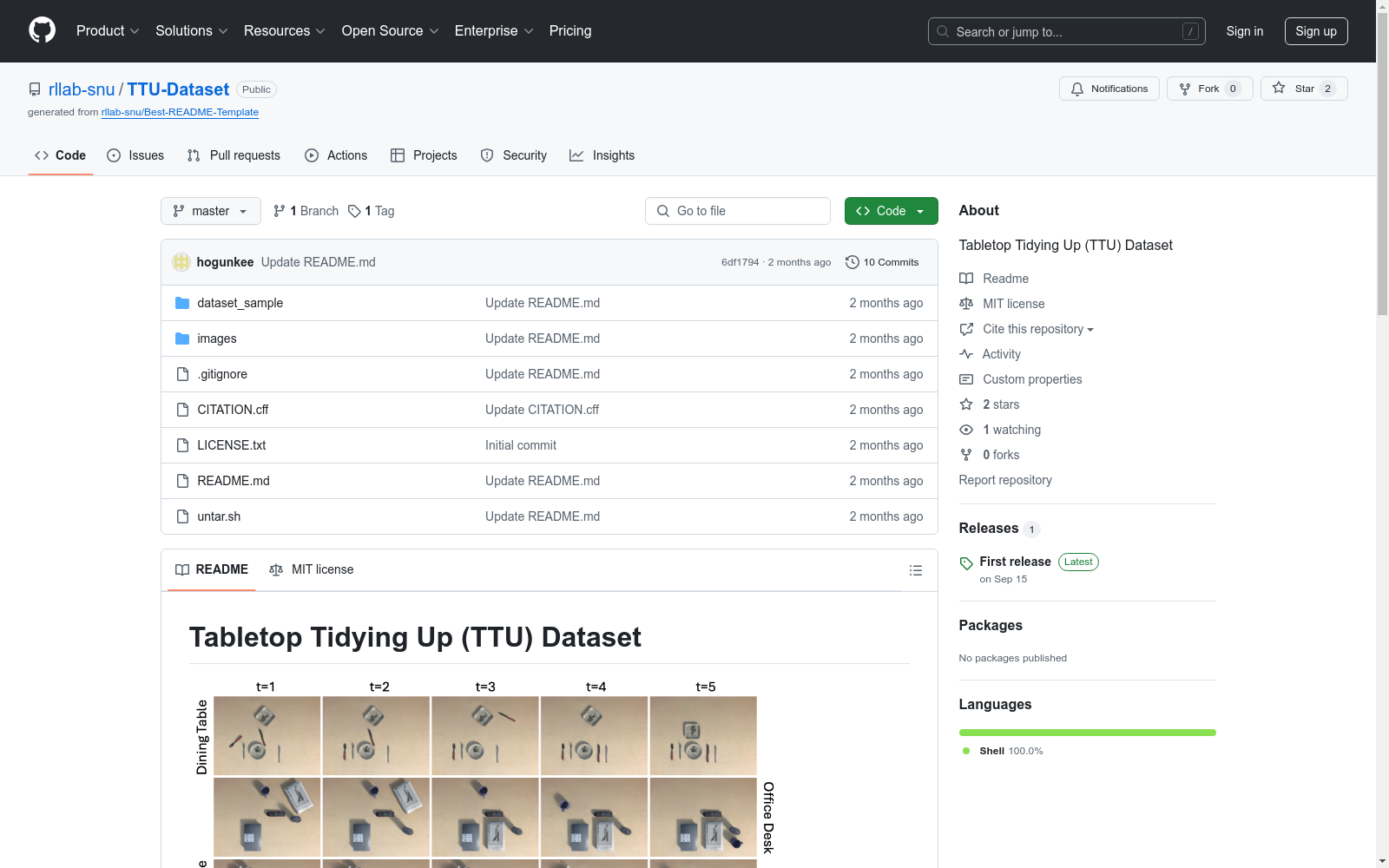
Tabletop Tidying Up (TTU) Dataset
收藏Tabletop Tidying Up (TTU) Dataset
数据集概述
TTU数据集专注于桌面整理任务,提供了丰富的场景和物体数据。
下载链接
数据集可通过以下链接下载: https://drive.google.com/drive/folders/1IfoVZwOTbjoapbo2uRAHHm0loH1GONUZ
文件列表
下载的文件包括:
- train_B.tar.gz
- train_C.tar.gz
- train_D.tar.gz
- train_O.tar.gz
- test_SU.tar.gz
- test_US.tar.gz
- test_UU.tar.gz
解压命令
下载后,使用以下命令解压数据集: bash $ source untar.sh
数据结构
数据集的目录结构如下:
TTU_dataset/ ├── train/ │ └── {scene_id}/ # scene_id: (B1, B2, …, C1, C2, …, D1, D2, …, O1, O2, …) │ └── template_{template_num}/ # template_num: (00001 ~ 00016) │ └── traj_{trajectory_num}/ # trajectory_num: (00000 ~ 00099) │ └── {frame_num}/ # frame_num: (000 ~ 004) │ ├── rgb_top.png │ ├── rgb_front_top.png │ ├── depth_top.npy │ ├── deoth_front_top.npy │ ├── seg_top.npy │ ├── seg_front_top.npy │ └── obj_info.json ├── test-seen_obj-unseen_template/ │ └── ... ├── test-unseen_obj-seen_template/ │ └── ... └── test-unseen_obj-unseen_template/ └── ...
许可证
数据集遵循MIT许可证。详细信息请参阅LICENSE文件。
联系信息
- Hogun Kee - hogun.kee@rllab.snu.ac.kr
- Wooseok Oh - wooseok.oh@rllab.snu.ac.kr