POMDAR
收藏arXiv2026-04-10 更新2026-04-14 收录
下载链接:
https://srl-ethz.github.io/POMDAR/
下载链接
链接失效反馈官方服务:
资源简介:
POMDAR是由苏黎世联邦理工学院软体机器人实验室开发的仿人机器人手灵巧性标准化评测基准,包含18项涵盖垂直/水平支架、连续旋转和纯抓取等配置的任务。该数据集基于人类运动控制分类学构建,通过3D打印机械支架约束任务动作以消除干扰策略,量化评分结合任务准确性和执行速度。其开源设计支持实验室复现,应用于机器人手设计优化与跨平台灵巧性对比研究,旨在解决仿人机械手领域缺乏统一评测标准的难题。
POMDAR is a standardized dexterity evaluation benchmark for anthropomorphic robotic hands, developed by the Soft Robotics Lab at ETH Zurich. It encompasses 18 tasks with configurations including vertical/horizontal fixtures, continuous rotation, and pure grasping. Constructed based on the human motor control taxonomy, this benchmark employs 3D-printed mechanical fixtures to constrain task movements and eliminate distraction strategies, with its quantitative scoring combining both task accuracy and execution speed. Its open-source design enables laboratory replication, supporting applications in robotic hand design optimization and cross-platform dexterity comparative studies, and aims to address the gap of unified evaluation standards in the field of anthropomorphic robotic hands.
提供机构:
苏黎世联邦理工学院·软体机器人实验室
创建时间:
2026-04-10
原始信息汇总
POMDAR 数据集概述
数据集基本信息
- 数据集名称:POMDAR
- 核心定位:一个基于分类学的拟人化机器人灵巧性基准测试
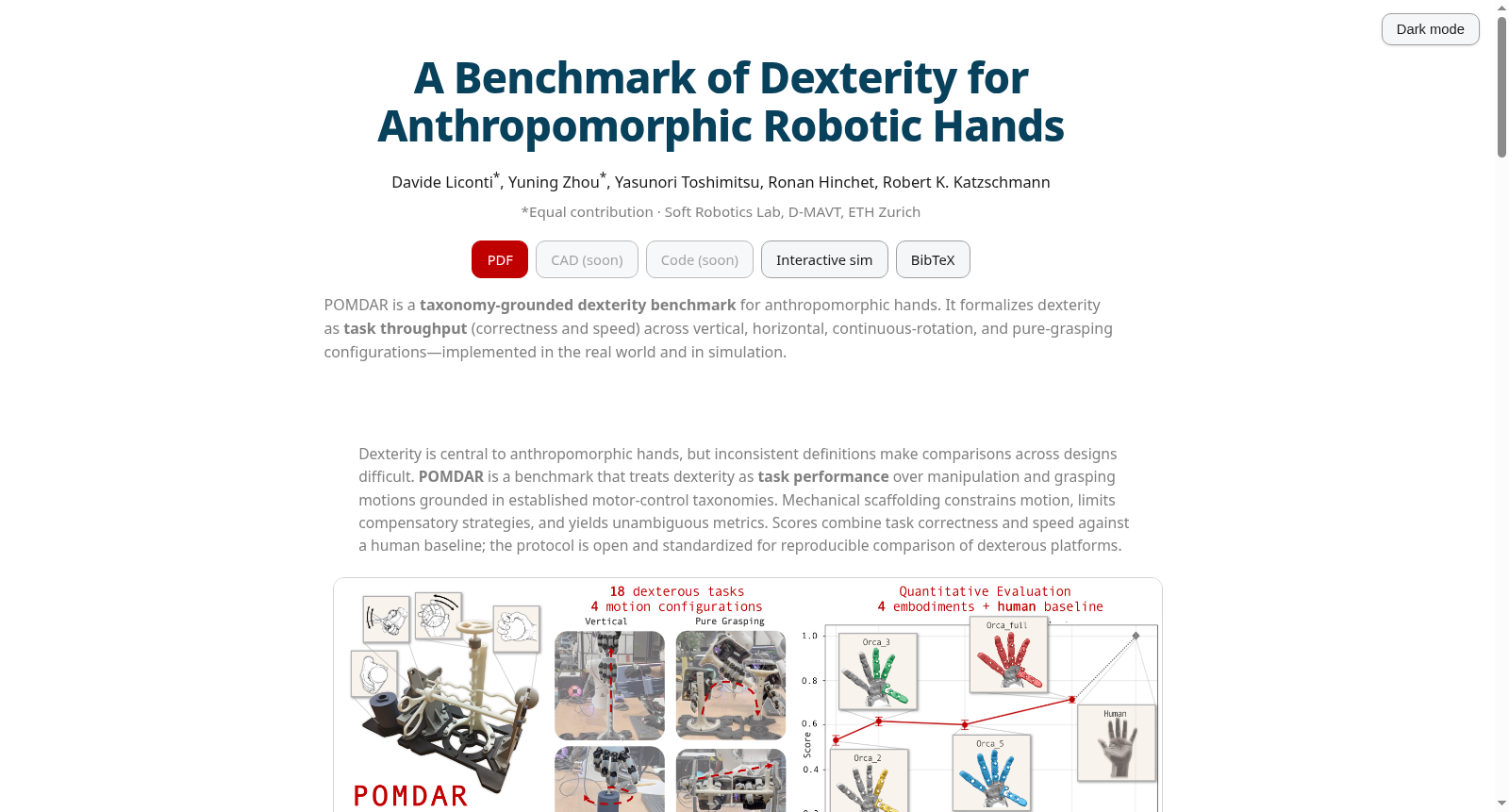
- 核心定义:将灵巧性形式化为跨垂直、水平、连续旋转和纯抓取配置的任务吞吐量(正确性和速度)
- 实现方式:在现实世界和仿真中实现
基准测试设计原理
- 设计目标:解决因灵巧性定义不一致而导致的跨设计比较困难的问题。
- 核心理念:遵循基于性能的范式,基准测试任务可追溯到操作和抓取分类法,分数反映手在接触丰富的交互中实际实现的内容。
- 关键特性:
- 代表性任务:基于Elliott & Connolly、Ma & Dollar以及Feix等人的GRASP分类法。
- 可复现的硬件:采用消费级3D打印,任务间共享组件,占用空间小。
- 可观察的运动:通过限制非预期手臂/手腕补偿的支架实现。
- 吞吐量分数:正确性(权重0.8)与相对于人类基准的速度(权重0.2)的加权组合。
基准测试构成
任务将重叠的分类条目整合为一组实践任务集:
- 12个操作模式(垂直、水平和连续旋转)
- 6个纯抓取任务
任务配置详情
- 垂直任务(V1–V3):轮子、棍子、球体。在保持手中控制的同时,通过离散的凹口前进。
- 水平任务(H1–H5):剪刀、筷子、挤压、掌部、捏取。沿弯曲轨道平移,难度递增。
- 连续任务(C1–C4):螺纹、棍子、轮子、解压玩具。使用离合器和齿轮机构进行持续旋转。
- 抓取任务(G1–G6):轮子、球体、圆盘和三种尺寸的圆柱体。在自由空间中重新定位以测试抓取质量。
交互式仿真
- 仿真环境:MuJoCo
- 功能:可在浏览器中探索基准测试物体的模型,包括环绕摄像机、暂停以及拖动物体施加力。
遥操作实验结果
- 实验设置:在Franka机械臂上,使用Rokoko动作捕捉手套,遥操作ORCA手部实体(2指、3指、5指无外展和完整的16自由度)。
- 结果展示:雷达图总结了每个实体在每项任务上的分数(操作和抓取面板)。可点击任务观看代表性的遥操作视频片段。
引用信息
bibtex @article{liconti2026pomdar, title={A Benchmark of Dexterity for Anthropomorphic Robotic Hands}, author={Liconti, Davide and Zhou, Yuning and Toshimitsu, Yasunori and Hinchet, Ronan and Katzschmann, Robert K.}, journal={arXiv preprint}, year={2026} }
搜集汇总
数据集介绍
构建方式
在仿人机器人手灵巧性评估领域,POMDAR数据集的构建遵循了系统化与理论驱动的原则。其任务设计根植于人类运动控制与抓握分类学的经典文献,从Elliott & Connolly的13种操作模式与Feix的GRASP分类法中33种抓握类型中,提炼出具有代表性的动作基元。通过分析操作任务与抓握类型的重叠关系,数据集最终整合为12个操作任务与6个纯抓握任务,共计18项。所有物理装置均采用消费级3D打印技术制造,并配备了机械支架以约束任务运动、抑制补偿性策略,确保动作的标准化与评估的无歧义性。同时,数据集提供了完整的MuJoCo仿真环境,通过简化几何模型与特定任务建模策略,实现了高效稳定的虚拟评估。
使用方法
使用POMDAR数据集进行评估时,需遵循其标准化的基准协议。对于每项任务,评估系统需在规定的机械约束下完成操作,例如在垂直配置中拉动带有刻度的杆,或在水平配置中沿弯曲轨道平移物体。数据收集后,需计算两个核心分数:正确性分数,根据任务完成进度(如通过的凹槽数量、清除的曲线数量或达到的旋转角度)进行归一化;速度分数,以预先建立的人类基线完成时间为参照进行计算。最终的任务得分为两者以0.8与0.2权重的加权和,该权重设计优先考虑了任务完成的鲁棒性。该评分体系支持对不同的机器人手构型进行客观、可解释的横向比较,无论是通过遥操作还是自主控制策略进行测试。
背景与挑战
背景概述
在仿人机器人手的设计与评估领域,灵巧性是一个核心但定义模糊的概念。长期以来,学术界缺乏一个统一、基于性能的灵巧性定义和标准化评估框架,导致不同系统在异构标准下进行评估,难以进行有意义的横向比较。为填补这一研究空白,苏黎世联邦理工学院软体机器人实验室的研究团队于2026年提出了POMDAR基准。该基准将灵巧性形式化为在一系列结构化操作与抓取任务中的性能表现,其任务设计根植于人类运动控制的成熟分类学。POMDAR的创立旨在为仿人机器人手提供一个开源、标准化且可复现的评估工具,从而推动灵巧操作平台的系统性发展。
当前挑战
POMDAR基准致力于解决仿人机器人手灵巧性评估领域的核心挑战,即如何超越基于运动学参数(如自由度数量)的代理指标,实现对真实接触交互中操作性能的客观、可量化衡量。在构建过程中,研究团队面临多重挑战:其一,需将抽象的灵巧性概念转化为具体、可测量的任务集,同时确保这些任务能全面覆盖从粗大到精细的操作技能谱系;其二,设计机械支架以约束任务运动、抑制补偿策略,并实现无歧义的度量,这需要精巧的机械设计;其三,创建一套结合任务正确性与执行速度的定量评分标准,以有效捕捉作为吞吐量的灵巧性,并确保其在不同手部设计间的可比性与可解释性。
常用场景
经典使用场景
在仿人机器人手灵巧性评估领域,POMDAR数据集被广泛用于标准化性能测试。该数据集通过整合垂直、水平、连续旋转及纯抓取四种配置,构建了包含18项任务的综合基准。研究人员利用这一框架,能够系统性地量化不同机械手在执行精细操作与稳定抓取任务时的表现,从而实现对灵巧性的客观、可重复比较。其经典应用场景包括在实验室环境中,对新型仿人机械手原型进行性能验证与优化,为设计迭代提供关键数据支撑。
解决学术问题
POMDAR数据集有效解决了仿人机器人手领域长期存在的灵巧性定义与评估标准不统一的问题。传统方法常依赖自由度数量等代理指标,难以反映实际任务性能。该数据集基于人类运动控制分类学,将灵巧性形式化为结构化任务集中的性能表现,并引入结合任务正确性与执行速度的量化评分指标。这使得不同手部设计能够在同一基准下进行公平比较,促进了灵巧操作平台的系统性发展,填补了标准化评估框架的空白。
实际应用
在实际应用中,POMDAR数据集为机器人手的设计选型与性能认证提供了可靠工具。工业界与学术界可利用其全3D打印的开源设计,快速搭建测试平台,评估机械手在装配、精细操作等场景下的实际能力。例如,在研发用于医疗辅助或精密制造的仿人机械手时,工程师可通过该基准测试不同实施例在剪刀使用、筷子操控等任务中的表现,从而匹配特定应用需求,优化机械手形态与控制系统。
数据集最近研究
最新研究方向
在仿人机器人手灵巧性评估领域,POMDAR数据集的提出标志着从传统参数化评估向基于任务性能的标准化度量范式的关键转变。该数据集以人类运动控制分类学为理论基础,通过18项涵盖垂直、水平、连续旋转及纯抓取四种配置的结构化任务,构建了可量化、可复现的灵巧性评估框架。当前前沿研究聚焦于利用该基准推动学习型自主策略的开发,旨在解耦操作者技能与机械本体能力,实现更本质的灵巧性比较。同时,数据集的开源特性与全3D可打印设计促进了跨实验室的标准化验证,为仿人手机械设计优化、控制算法迭代及跨形态平台公平比较提供了关键基础设施。相关研究正探索将基准扩展至动态交互场景,并开发参数化对象集以降低对特定手部形态的偏见,推动灵巧性评估向更全面、自适应方向发展。
相关研究论文
- 1A Benchmark of Dexterity for Anthropomorphic Robotic Hands苏黎世联邦理工学院·软体机器人实验室 · 2026年
以上内容由遇见数据集搜集并总结生成


