CNS Dataset
收藏github2025-04-09 更新2025-04-13 收录
下载链接:
https://github.com/Hyunho111/CNS_dataset
下载链接
链接失效反馈官方服务:
资源简介:
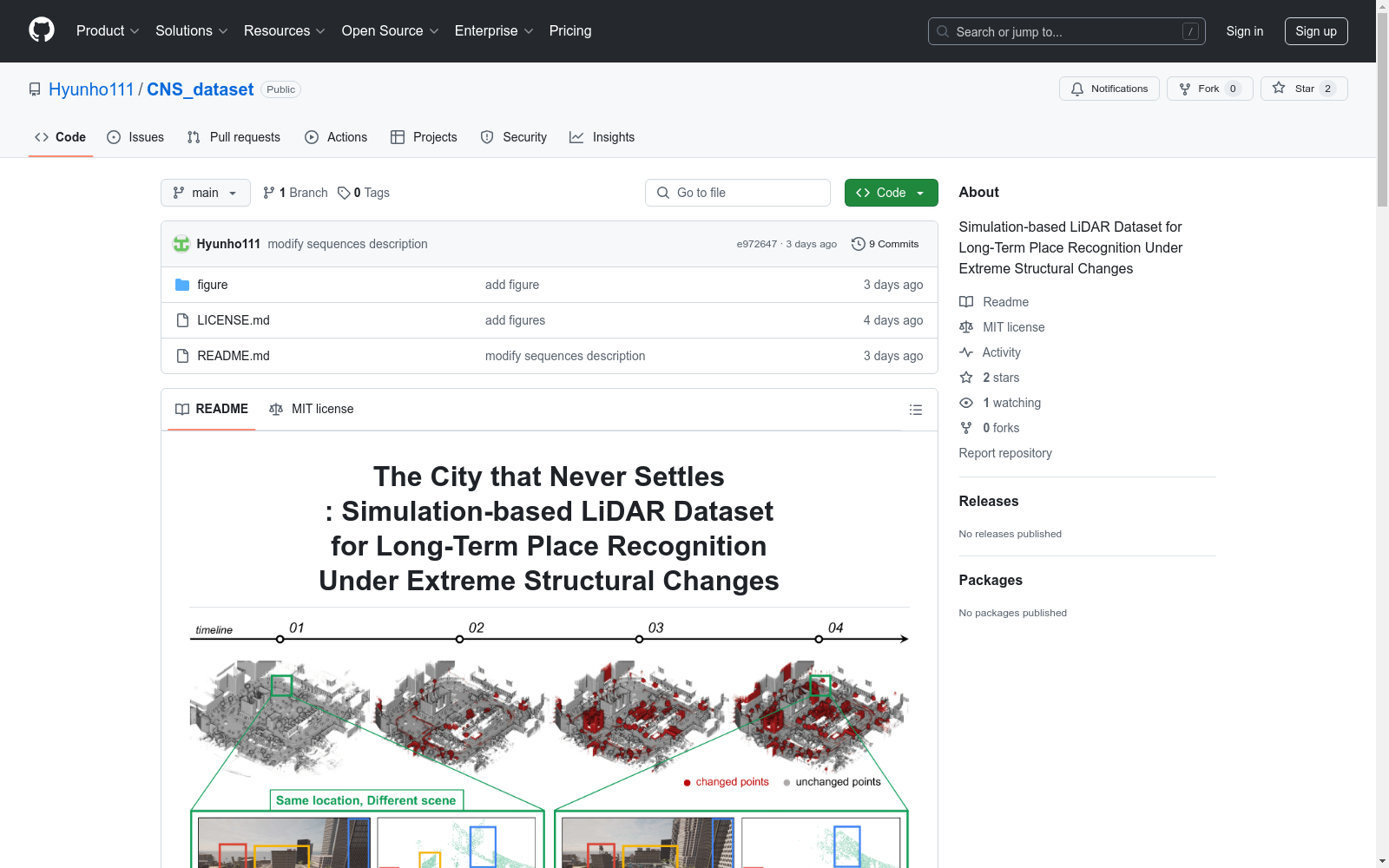
我们介绍了CNS,一个使用CARLA模拟器创建的基于模拟的数据集,捕捉了不同地图和序列中的主要结构变化,如建筑建设和拆除。我们希望我们的数据集能够进一步推动长期地点识别在现实世界建设和拆除任务中的进展。
We introduce CNS, a simulated dataset created using the CARLA simulator, which captures major structural changes such as building construction and demolition across diverse maps and sequences. We hope that this dataset will further advance the progress of long-term place recognition in real-world construction and demolition tasks.
创建时间:
2025-04-09
原始信息汇总
CNS数据集概述
数据集简介
- 名称:The City that Never Settles (CNS)
- 类型:仿真LiDAR数据集
- 用途:用于极端结构变化下的长期地点识别(PR)研究
- 特点:捕捉建筑物建设/拆除等主要结构变化
传感器配置
- LiDAR:
- 型号:Ouster OS1(32通道)
- 安装位置:车辆顶部
- 垂直视场角:±22.5°
- 最大测距:120m
- IMU:
- 提供理想惯性数据(零偏置和噪声)
- 数据同步:所有传感器以20Hz频率同步采集
数据格式
CNS │ transformation_lidar.yaml │ transformation_imu.yaml │ └─Map └─Sequence │ gt.csv │ imu.csv │ └─pcd TIME_STAMP.pcd
- LiDAR数据:
- 格式:PCD文件(包含XYZI点云数据)
- 存储位置:pcd文件夹
- IMU数据:
- 格式:CSV文件
- 内容:[时间戳, 四元数(x,y,z,w), 角速度(x,y,z), 线加速度(x,y,z)]
- 地面真值:
- 格式:CSV文件
- 内容:[时间戳, 位置(x,y,z), 四元数(qx,qy,qz,qw)]
- 变换矩阵:
- 存储格式:YAML文件
序列信息
- 总序列数:12个(4个地图)
- 地图分布:
- Downtown:4个序列(01-04)
- Metropolis:4个序列(01-04)
- Riverside:2个序列(01-02)
- Suburbia:2个序列(01-02)
- 序列特点:
- 编号越小表示结构越少
- 编号增大模拟建设过程
- 编号减小模拟拆除过程
地图描述
-
Riverside:
- 类型:小型住宅区
- 特征:包含小河和桥梁
- 来源:CARLA Town01地图
-
Suburbia:
- 类型:混合城镇
- 特征:住宅/商业区混合,多T型路口
- 来源:CARLA Town02地图
-
Downtown:
- 类型:大型城区
- 特征:多样化道路类型,中央商务区
- 来源:CARLA Town03地图
-
Metropolis:
- 类型:密集城区
- 特征:多车道道路,摩天大楼,复杂交叉口
- 来源:CARLA Town10地图
下载信息
- 下载链接:https://drive.google.com/drive/folders/11HlqJziq6lDGVjYX8FdcVlmkA2EVDSsx?usp=sharing
许可信息
- 许可证:MIT许可证
搜集汇总
数据集介绍
构建方式
在自动驾驶与城市数字化领域,长期地点识别面临极端结构变化的挑战。CNS数据集通过CARLA仿真平台精心构建,模拟了建筑物施工与拆除等重大结构变化场景。该数据集包含4张地图和12条序列,每条序列代表不同阶段的结构变化,从低编号序列(少量建筑)到高编号序列(完整建筑环境)模拟施工过程,反之则模拟拆除过程。数据采集采用32通道LiDAR(模拟Ouster OS1设计)和理想化IMU传感器,以20Hz频率同步记录,所有传感器数据均经过严格的时间对齐和坐标转换处理。
特点
CNS数据集的核心价值在于其独特的极端结构变化模拟能力。数据集涵盖四种典型城市场景:滨水住宅区(Riverside)、混合功能郊区(Suburbia)、多元道路类型的市中心(Downtown)以及密集路网的超级都市(Metropolis)。每个场景均提供不同建设阶段的点云数据,LiDAR点云采用PCD格式存储,包含XYZI四维信息,最大探测距离达120米。配套的IMU数据提供零偏差的理想惯性测量,地面真值则通过CARLA内置里程计精确获取。这种多层次、多阶段的结构变化模拟为长期地点识别算法提供了极具挑战性的测试平台。
使用方法
该数据集采用层级化目录结构组织,根目录包含传感器转换矩阵的YAML文件,各地图子目录下存储具体序列数据。研究人员可通过gt.csv获取时间戳对齐的车辆位姿真值,imu.csv包含四元数姿态、角速度及线加速度数据,pcd文件夹则存储按时间戳命名的点云文件。使用前需通过transformation_lidar.yaml和transformation_imu.yaml完成传感器坐标系转换。典型应用流程包括:加载对应序列的点云序列与真值数据,利用IMU信息进行运动补偿,最后通过位姿比对评估长期地点识别算法在结构变化环境下的鲁棒性表现。
背景与挑战
背景概述
CNS数据集由研究团队利用CARLA仿真平台构建,旨在解决长期位置识别(Long-Term Place Recognition, PR)在极端结构变化环境下的挑战。该数据集通过模拟城市环境中建筑物建设与拆除等重大结构变化,提供了多样化的地图和序列数据。数据集包含四个不同地图和十二个序列,每个序列代表不同阶段的结构变化,为研究长期位置识别提供了丰富的实验场景。CNS数据集的推出,为自动驾驶、机器人导航等领域在动态环境中的位置识别研究提供了重要的数据支持。
当前挑战
CNS数据集面临的挑战主要体现在两个方面:一是领域问题的挑战,长期位置识别在极端结构变化环境下需要解决场景外观和几何特征剧烈变化的问题,这对算法的鲁棒性和适应性提出了极高要求;二是构建过程中的挑战,如何在仿真环境中精确模拟现实世界中的结构变化,并确保传感器数据的同步性和一致性,是数据集构建中的关键难点。此外,数据集的多样性和复杂性也对存储和处理能力提出了较高要求。
常用场景
经典使用场景
在自动驾驶和机器人定位领域,长期地点识别(Long-Term Place Recognition, PR)面临极端结构变化带来的挑战。CNS数据集通过模拟城市环境中建筑物施工与拆除等结构性变化,为研究者提供了一个丰富多样的测试平台。该数据集包含四个不同地图和十二个序列,每个序列代表结构变化的不同阶段,从低编号序列的较少结构到高编号序列的完全建成环境,为长期地点识别算法的开发和评估提供了理想的数据支持。
实际应用
CNS数据集的实际应用场景主要集中在自动驾驶和城市机器人导航领域。在现实世界中,城市环境经常因施工、拆除或自然灾害而发生结构性变化。该数据集模拟的这些极端变化场景,为自动驾驶系统在动态城市环境中的长期定位和导航提供了宝贵的测试数据。通过在这些模拟场景中训练和验证算法,可以显著提高自动驾驶车辆在真实世界中的适应性和可靠性。
衍生相关工作
CNS数据集已经衍生出多项经典研究工作,特别是在基于LiDAR的地点识别和长期定位领域。研究者利用该数据集开发了多种应对结构变化的鲁棒性算法,如基于深度学习的点云特征提取方法和时序一致性验证技术。这些工作不仅推动了地点识别算法的发展,也为相关领域如同时定位与建图(SLAM)和环境变化检测提供了新的研究思路和技术基础。
以上内容由遇见数据集搜集并总结生成


