UAV3D
收藏arXiv2024-10-15 更新2024-10-17 收录
下载链接:
https://huiyegit.github.io/UAV3D_Benchmark/
下载链接
链接失效反馈官方服务:
资源简介:
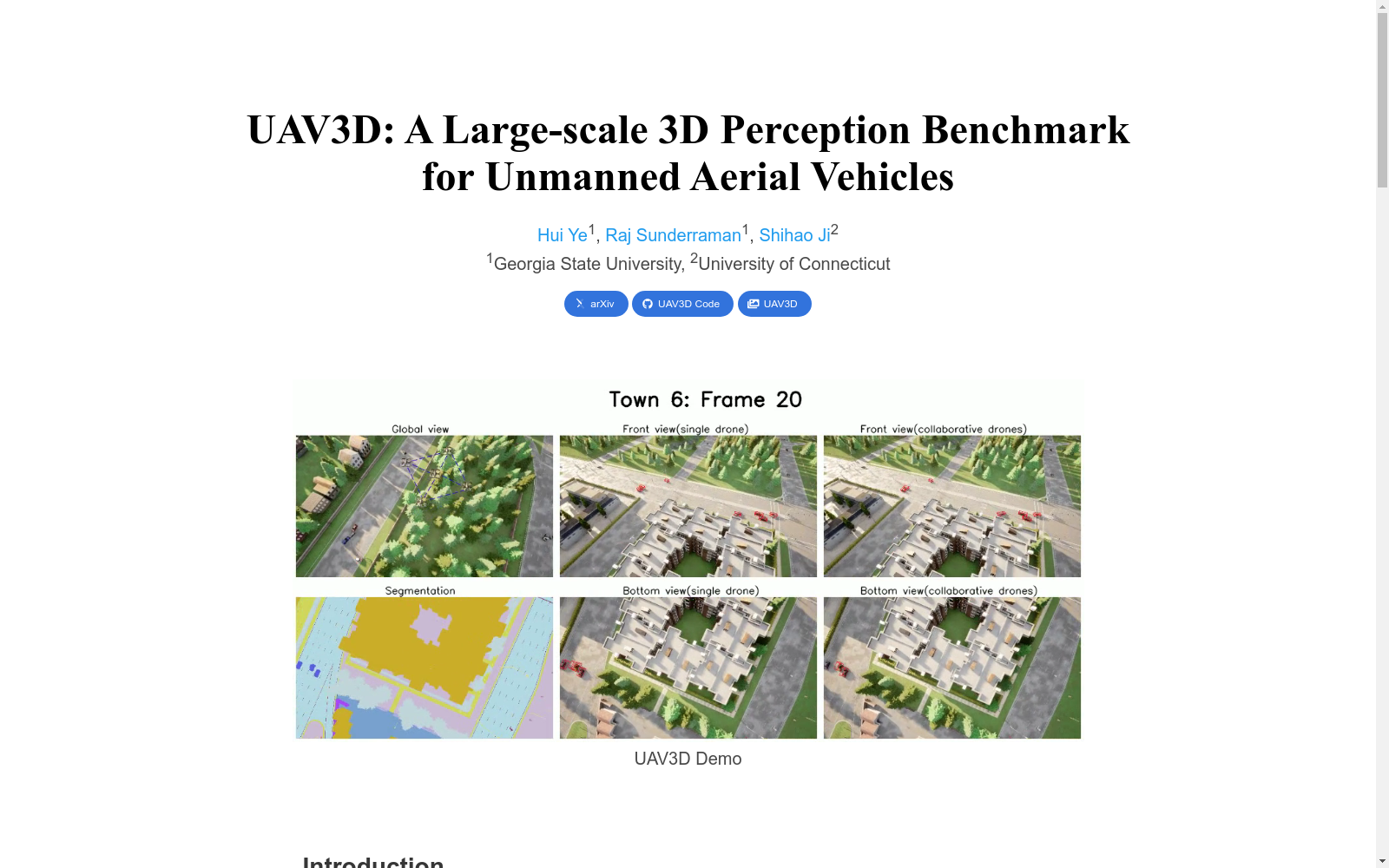
UAV3D是由佐治亚州立大学和康涅狄格大学联合创建的一个大规模3D感知基准数据集,专为无人机应用设计。该数据集包含500,000张图像,覆盖1000个场景,每个场景有20帧,每帧都标注了3D边界框,支持四项3D感知任务。数据集通过CARLA和AirSim模拟器创建,模拟了复杂的交通情况和多无人机协作场景。UAV3D旨在推动无人机在3D环境中的物体检测和跟踪研究,解决现有2D数据集在3D感知能力上的不足。
UAV3D is a large-scale 3D perception benchmark dataset jointly created by Georgia State University and the University of Connecticut, specifically designed for unmanned aerial vehicle (UAV) applications. This dataset includes 500,000 images spanning 1000 unique scenes, with 20 frames per scene. Each frame is annotated with 3D bounding boxes, and the dataset supports four distinct 3D perception tasks. The dataset is generated using the CARLA and AirSim simulators, which simulate complex traffic scenarios and multi-UAV collaboration environments. UAV3D aims to promote research on object detection and tracking for UAVs in 3D environments, addressing the shortcomings of existing 2D datasets in terms of 3D perception capabilities.
提供机构:
佐治亚州立大学
创建时间:
2024-10-15
原始信息汇总
UAV3D: A Large-scale 3D Perception Benchmark for Unmanned Aerial Vehicles
数据集概述
UAV3D是一个为无人机平台设计的公开大规模3D感知基准数据集。该数据集包含合成数据和3D感知算法,旨在促进单无人机和协作无人机3D感知任务的研究。
数据集组成
- 场景数量: 1,000个场景
- 训练集: 700个场景
- 验证集: 150个场景
- 测试集: 150个场景
- 图像数量: 500,000张RGB图像
- 3D框数量: 3,300,000个
场景规划
- 地点: 城市区域(Towns 3和10)和郊区区域(Towns 6和7)
- 飞行路线: 每个地图从左下到右上250条路线
- 场景分布: 700个训练场景,150个验证场景,150个测试场景
传感器设置
- RGB相机位置: 前、左、右、中心和后
- 旋转角度: 底部相机提供鸟瞰图,其他四个相机俯仰角为-45度
- 分辨率: 800x450像素
无人机编队
- 编队形状: 十字形编队,前、左、右、中心和后
- 距离: 每个无人机距离中心无人机20米
- 高度: 无人机编队在60米高度保持编队
数据格式
- 标注类型: 3D边界框和像素级语义标签
- 3D框定义: 中心位置(x, y, z坐标)、尺寸(宽度、长度、高度)和方向角度(偏航、俯仰、横滚)
- 车辆类别: 27个类别
搜集汇总
数据集介绍
构建方式
UAV3D数据集通过利用CARLA和AirSim模拟器进行构建,这两个模拟器分别用于交通流量模拟和数据记录。在CARLA中,车辆被随机生成并在城镇中导航,而AirSim则用于模拟飞行无人机。每个无人机配备五个RGB摄像头,以同步记录图像数据。数据集包含1000个场景,每个场景有20帧,每帧包含来自五个无人机的25张图像。通过这种方式,UAV3D数据集提供了丰富的3D感知任务所需的多视角图像数据。
特点
UAV3D数据集的一个显著特点是其大规模和多样性。该数据集包含500,000张图像和330万个3D边界框标注,覆盖了四个不同的城镇,提供了城市和郊区两种不同的交通环境。此外,数据集还提供了多种标注,包括3D边界框、车辆轨迹和语义标签,支持多种下游任务,如检测、跟踪和语义分割。
使用方法
UAV3D数据集适用于多种3D感知任务的研究,包括单无人机3D物体检测、单无人机物体跟踪、协作无人机3D物体检测和协作无人机物体跟踪。研究者可以使用数据集中的图像和标注来训练和评估模型。数据集的格式与nuScenes数据集兼容,便于使用现有的nuScenes开发工具包进行处理和分析。
背景与挑战
背景概述
UAV3D数据集由佐治亚州立大学和康涅狄格大学的研究人员于2024年创建,旨在推动无人驾驶飞行器(UAV)在三维感知任务中的研究。该数据集的核心研究问题是如何在复杂环境中实现UAV的3D物体检测和跟踪,特别是在单UAV视角受限的情况下。UAV3D包含了1000个场景,每个场景有20帧,并提供了详细的3D边界框标注,涵盖了单UAV和协作UAV的3D物体检测与跟踪任务。这一数据集的推出填补了现有UAV数据集主要集中在2D感知任务的空白,对推动UAV在实际应用中的3D环境理解具有重要意义。
当前挑战
UAV3D数据集在构建过程中面临多项挑战。首先,如何在高成本和高劳动强度的情况下,通过模拟环境有效生成大规模的3D标注数据是一个主要难题。其次,单UAV在长距离或遮挡区域中的感知能力受限,需要通过UAV之间的协作来提升感知性能。此外,现有的大多数UAV数据集主要针对2D感知任务,而UAV3D则专注于3D感知,这要求研究者开发新的算法和模型来充分利用3D信息。最后,如何确保模拟数据与真实世界数据之间的域适应性,以便模型在实际应用中能够有效迁移,也是一个亟待解决的问题。
常用场景
经典使用场景
UAV3D数据集的经典使用场景主要集中在无人机(UAV)的3D感知任务中,特别是在单无人机和多无人机协作的3D物体检测与跟踪任务中。该数据集通过提供1000个场景,每个场景包含20帧完全标注的3D边界框,支持单无人机和多无人机在复杂环境中的3D感知研究。这些任务对于无人机在空中摄影、监控和农业等应用中的有效部署至关重要。
衍生相关工作
UAV3D数据集的发布催生了一系列相关研究工作,特别是在多无人机协作感知和3D物体检测领域。例如,基于UAV3D数据集的研究已经提出了多种协作感知算法,如When2Com、Who2Com、V2VNet和DiscoNet,这些算法通过优化无人机间的通信策略,显著提升了感知性能。此外,UAV3D还激发了对模拟数据与真实世界数据之间域适应技术的研究,以进一步提升无人机在实际应用中的表现。
数据集最近研究
最新研究方向
在无人机(UAV)技术的迅猛发展中,UAV3D数据集的引入标志着3D感知领域的一个重要里程碑。该数据集不仅为单无人机3D物体检测和跟踪提供了丰富的资源,还通过模拟多无人机协同感知任务,推动了无人机在复杂环境中的应用。UAV3D数据集的前沿研究方向主要集中在提升多无人机系统在遮挡区域和远距离环境中的感知能力,通过高效的无人机间通信和信息融合技术,实现更精确的3D物体定位和跟踪。这一研究不仅对无人机在农业、监控和灾害管理等领域的实际应用具有重要意义,也为未来多智能体协同感知系统的开发提供了宝贵的数据支持和理论基础。
相关研究论文
- 1UAV3D: A Large-scale 3D Perception Benchmark for Unmanned Aerial Vehicles佐治亚州立大学 · 2024年
以上内容由遇见数据集搜集并总结生成


