LRDDv3: High-Resolution Long-Range Drone Detection Dataset
收藏arXiv2026-05-25 更新2026-05-27 收录
下载链接:
https://research.coe.drexel.edu/ece/imaple/lrddv3/
下载链接
链接失效反馈官方服务:
资源简介:
LRDDv3是由德雷塞尔大学iMaPLe研究实验室创建的高分辨率长距离无人机检测数据集,旨在解决无人机在复杂真实场景中远距离检测的挑战。该数据集包含102,532张4K分辨率的RGB图像和29,630张配对的640x512红外图像,总计源自8个月内17个不同采集日拍摄的128段视频片段,覆盖了多样化的光照条件、天气背景和飞行环境。数据通过移动飞行相机以5 FPS采样率收集,并标注了无人机距离信息(0-200米),增强了模型在遮挡、背景融合及小目标检测下的泛化能力。该数据集主要应用于无人机检测与跟踪、计算机视觉算法开发及航空安全系统,旨在提升无人机在共享空域中长距离、多模态感知的可靠性与准确性。
LRDDv3 is a high-resolution long-range drone detection dataset created by the iMaPLe Research Laboratory at Drexel University, which aims to address the challenges of long-distance drone detection in complex real-world scenarios. This dataset contains 102,532 4K-resolution RGB images and 29,630 paired 640×512 infrared images, collectively sourced from 128 video segments captured across 17 different collection days over an 8-month period, covering diverse lighting conditions, weather backgrounds and flight environments. The data was collected with a mobile airborne camera at a sampling rate of 5 FPS, and annotated with drone distance information ranging from 0 to 200 meters, which enhances the generalization capability of models in scenarios including occlusion, background confusion and small target detection. This dataset is mainly applied to drone detection and tracking, computer vision algorithm development and aviation safety systems, with the goal of improving the reliability and accuracy of long-range, multimodal perception of drones in shared airspace.
提供机构:
德雷塞尔大学·iMaPLe研究实验室; 缅因大学
创建时间:
2026-05-25
原始信息汇总
数据集名称
LRDDv3: High-Resolution Long-Range Drone Detection Dataset with Range Information and Thermal Data
数据集简介
该数据集旨在解决高分辨率、远距离无人机检测领域高质量数据不足的问题,提供包含距离信息和热成像数据的远距离RGB与红外图像对。
数据集规模与构成
- 总图像数量: 102,532张远距离RGB图像
- 帧率: 5 FPS
- 视频片段数量: 128个不同视频片段
- 数据采集天数和时段: 17个不同的采集日,覆盖8个月,确保光照场景、飞行地点和背景元素的多样性
- 红外图像数量: 29,630张IR图像,与对应的RGB图像配对
图像分辨率
- RGB图像: 4K分辨率(高分辨率)
- 红外图像: 640×512像素
数据范围与场景
- 距离范围: 目标无人机与相机无人机之间的多数图像在0-50米内,最长可达175米
- 天气与光照条件: 主要为晴朗天气,包含部分雨雪条件;光照条件在阴天、部分阴天和晴天之间分布较为均衡
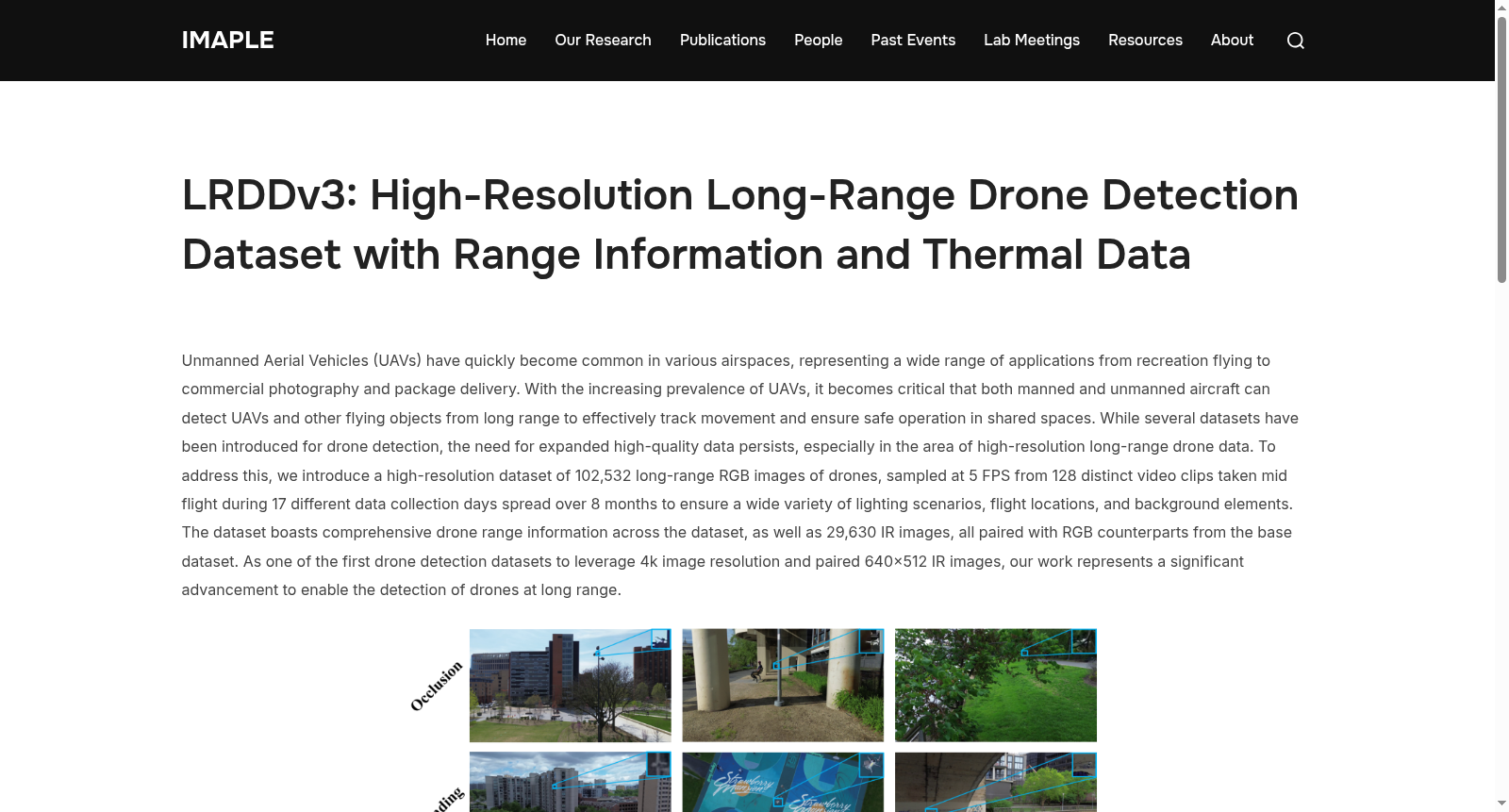
- 挑战场景: 包括被物体和树叶遮挡的无人机、在嘈杂背景中融合的无人机、以及雪、雨和晴朗天气条件下飞行的无人机
数据集划分
数据集分为训练集、验证集和测试集,分别针对RGB和热成像数据。
论文引用信息
该数据集由论文《LRDDv3: High-Resolution Long-Range Drone Detection Dataset with Range Information and Thermal Data》支持,该论文将在2026年IEEE国际机器人与自动化大会(ICRA)上发表。
数据获取状态
- 状态: 即将开放(Coming soon!)
搜集汇总
数据集介绍
构建方式
LRDDv3数据集由Drexel大学iMaPLe实验室构建,旨在填补高分辨率远距离无人机检测领域的空白。数据采集历时8个月,涵盖17个不同日期,通过三架无人机(两架DJI Mini 3和一辆Autel Robotics EVO II Dual 640T V3)协同飞行,在城区、乡村、森林和开阔场地等多种环境中拍摄。RGB影像以4K分辨率、30 FPS录制,红外影像以640×512分辨率同步采集,最终从128段视频中以5 FPS的子采样率提取102,532张RGB图像和29,630张热成像图像。标注流程结合YOLOv11自动标注、LabelImg人工校正及最终审核的三阶段策略,并利用GPS和高度数据计算无人机间距离,生成包含0至200米范围信息的元数据。数据集还额外标注了6,031只鸟类和722架飞机的实例。
特点
该数据集的核心特点在于其综合性与高多样性。首先,它采用4K超高分辨率RGB图像与640×512热红外图像配对,为多模态无人机检测提供了坚实基础。其次,数据覆盖了从黎明、正午到黄昏的不同光照条件,以及晴朗、阴雨和雪天等多种天气,并包含城市、水面、森林等复杂背景。远距离检测是另一亮点,无人机距离从0至200米不等,最小目标仅占12像素的边界框,极具挑战性。此外,动态飞行视角模拟了真实的机载检测场景,而低采样率(5 FPS)确保了背景的丰富变化,避免了相邻帧的冗余。最后,全面的距离元数据和多类别标注(无人机、鸟、飞机)使其成为评估模型泛化能力的理想基准。
使用方法
LRDDv3数据集可直接用于训练和评估基于深度学习的无人机检测模型。用户可从官方网站下载RGB和热红外图像及其对应的YOLO格式标注文件,以及包含距离信息的CSV元数据。数据集已划分为训练集、验证集和测试集,便于直接使用。推荐在训练时采用可变输入分辨率(如1920×1920)以充分利用4K图像中的小目标信息,或结合SAHI框架进行切片推理以提升远距离检测性能。热红外数据可与RGB图像联合训练多模态模型,而距离元数据则支持按距离区间进行性能分析。官方基准测试显示,基于YOLOv11m在1920分辨率下训练可获得mAP@50达0.822的优异结果,验证了该数据集对高分辨率检测研究的支撑作用。
背景与挑战
背景概述
LRDDv3是2026年由德雷塞尔大学iMaPLe研究实验室Knut Peterson等人创建的高分辨率远距离无人机检测数据集,旨在弥补现有数据集中高质量长距离无人机图像的不足。该数据集包含102,532张4K分辨率RGB图像与29,630张640x512热红外图像,覆盖8个月中17个采集日的128个视频片段,并提供了0至200米的全面距离元数据。作为首个融合4K分辨率与配对热红外数据的大规模无人机检测基准,LRDDv3通过多样化光照、天气及背景条件(如城市、水域、雪景),显著提升了模型在真实空域环境中对远距离无人机的泛化检测能力。
当前挑战
该数据集面临的挑战包括:1)领域问题层面,远距离无人机检测需解决目标像素极小(最小仅12像素)、光照剧烈变化、复杂背景干扰(如建筑遮挡、树叶融合)及恶劣天气(雨雪)下的鲁棒识别难题,同时需区分无人机与鸟类等易混淆物体。2)构建过程层面,需协调三架无人机(DJI Mini 3与Autel EVO II)在8个月内于多变环境(城市、林地、河面)中同步采集RGB与热红外视频,并精确计算双机间距离(结合GPS与高度数据,使用Haversine公式);标注流程采用YOLOv11预标注加人工三轮修正,确保热红外与RGB注释的跨模态对齐,且以5FPS低采样率优先保证图像多样性而非数量。
常用场景
经典使用场景
在无人机视觉感知与空中自主避障研究中,LRDDv3数据集被广泛用于训练和评估远距离微小无人机检测算法。研究者利用其102,532张4K高分辨率RGB图像与29,630张配套热红外图像,结合0至200米精确距离元数据,构建能够在复杂背景、多变光照与恶劣天气下稳定识别极小目标的检测模型。该数据集以5FPS低采样率从128段视频中抽取,确保了图像背景的丰富多样性,使其成为验证模型在远距离、多尺度、部分遮挡及背景融合等极端条件下泛化能力的经典基准。
衍生相关工作
LRDDv3的发布催生了一系列重要的衍生研究方向。研究者基于该数据集提出了面向极小目标的切片辅助超推理框架与多尺度注意力增强检测网络,显著提升了远距离无人机的识别精度。其丰富的热红外配对数据进一步激发了跨模态融合检测算法的发展,催生了利用可见光与热成像互补信息进行鲁棒目标定位的创新架构。此外,结合数据集的精确距离信息,学术界涌现出大量基于距离感知的模型训练策略与评估协议,推动了检测性能与物理距离之间关系的量化分析。这些工作不仅深化了对远距离无人机检测挑战的理解,也为下一代通用空中目标检测基准的建立奠定了方法论基础。
数据集最近研究
最新研究方向
在当前低空经济蓬勃发展与无人机应用日益泛化的背景下,远距离、高动态场景下的无人机稳健检测成为保障空域安全的核心瓶颈。LRDDv3数据集以前沿的4K超高清分辨率与同步640×512热红外成像为核心突破,首次在单一数据集中系统整合了跨8个月采集的17天多样性飞行数据,涵盖102,532张RGB图像与29,630张热红外-可见光配对图像,并创新性地提供了0-200米连续距离标注。该数据集精准回应了现有研究在极端小目标检测、复杂光照变化与多模态融合感知等热点方向上的数据匮乏问题,其发布的跨数据集基准测试表明,基于LRDDv3训练的YOLOv11模型在Det-Fly测试集上达到了0.485的mAP@50,超越其他同类数据集,且1920×1920高分辨率输入下的检测性能显著跃升至0.822,为发展抗遮挡、抗环境混淆的下一代机载视觉系统奠定了坚实的评测基础。
相关研究论文
- 1LRDDv3: High-Resolution Long-Range Drone Detection Dataset with Range Information and Thermal Data德雷塞尔大学·iMaPLe研究实验室; 缅因大学 · 2026年
以上内容由遇见数据集搜集并总结生成


