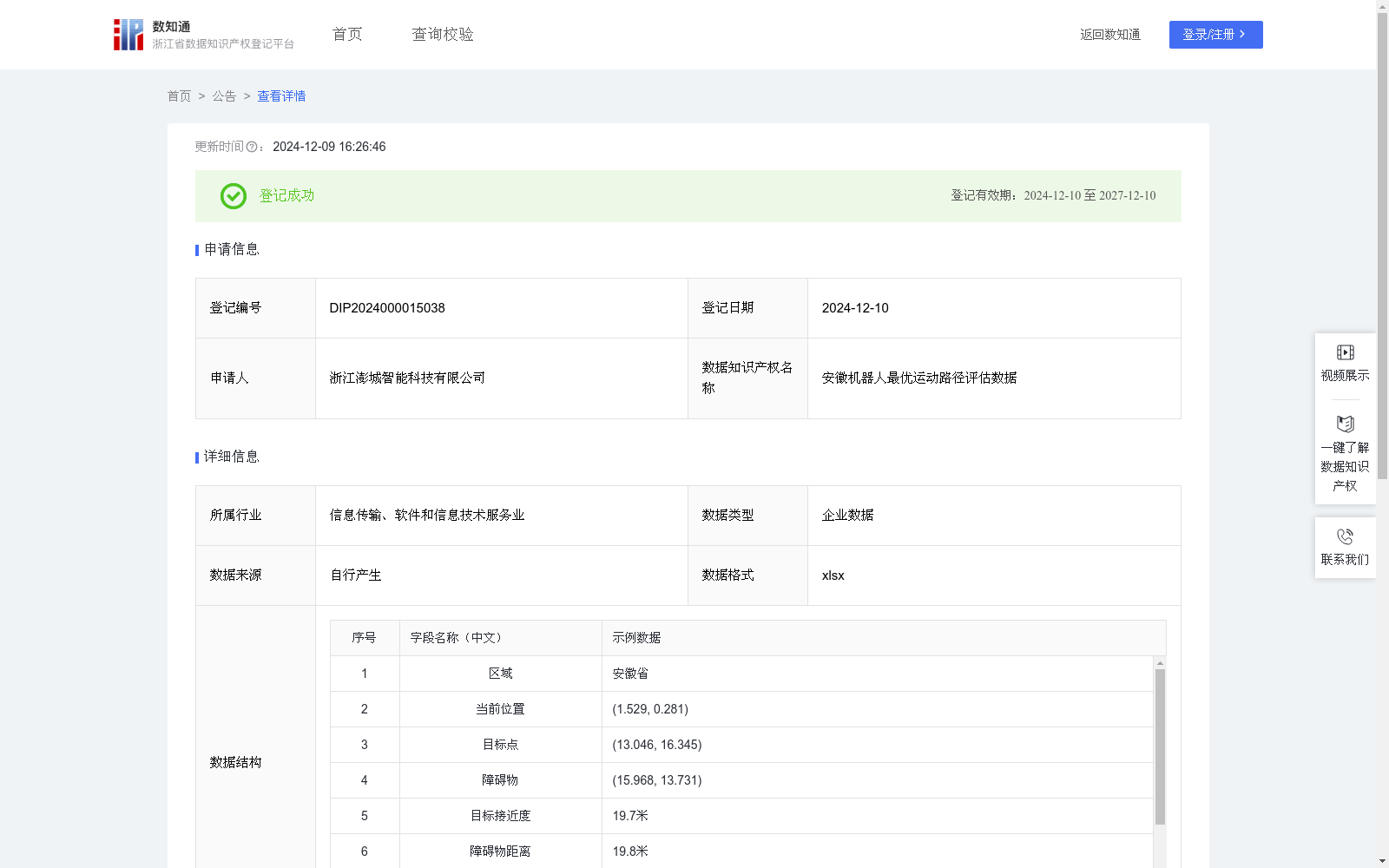
安徽机器人最优运动路径评估数据
收藏浙江省数据知识产权登记平台2024-12-09 更新2024-12-10 收录
下载链接:
https://www.zjip.org.cn/home/announce/trends/98702
下载链接
链接失效反馈官方服务:
资源简介:
本公司机器人通过对所在场景识别,计算到达目标位置的最优路径选择,在满足各种限制条件的情况下避开障碍物,能够安全、有效地移动,快速到达目标位置。
本数据适用于:
养老机构:机器人在运送药品、餐食等物品时,避开障碍物,避免碰撞到人和仪器。辅助医护人员完成日常护理工作。
酒店配送服务:融合在线下单等应用,在不同房间的客户下单后,机器人可以通过计算选择最优路径,准确、快速完成送餐、配送物品等服务。本公司研发机器人使用DWA算法(动态窗口算法),采集机器人在运动路径中的坐标:当前位置、目标点、障碍物,得到目标接近度、障碍物距离,以及合理的速度(线速度、角速度)和速度组合得分,最后对计算出的候选路径根据评价函数进行路径得分的评估。
方法如下:
1、设定机器人一个“动态窗口”,即机器人可达到的速度范围(线速度和角速度)。
2、在定义好的速度空间内,为每个可能的速度组合计算一个未来一段时间内的预测路径作为候选路径。
3、对每一个候选路径使用评价函数进行评估。评价标准包括:
目标接近度:使用欧几里得距离来衡量目标接近度,衡量该路径是否有助于机器人接近最终目标。
障碍物距离:评估该路径是否会与障碍物发生碰撞。离障碍物越远的路径得分越高。
速度合理性:考虑到机器人的运动效率,适当的速度组合得分会更高。
选择最佳路径:根据评价函数的结果选择得分最高的路径作为下一步的行动方案。
4、执行并重复:按照选定的最佳路径执行一小段动作后,再次重复上述过程,直到到达目标位置。
提供机构:
浙江澎城智能科技有限公司
创建时间:
2024-11-08
搜集汇总
数据集介绍
特点
安徽机器人最优运动路径评估数据是由浙江澎城智能科技有限公司产生的企业数据,记录了机器人在安徽省内的运动路径信息,用于养老机构和酒店配送服务中的最优路径选择和障碍物避让。
以上内容由遇见数据集搜集并总结生成


