NYUv2
收藏arXiv2024-11-02 收录
下载链接:
http://cs.nyu.edu/~silberman/datasets/nyu_depth_v2.html
下载链接
链接失效反馈官方服务:
资源简介:
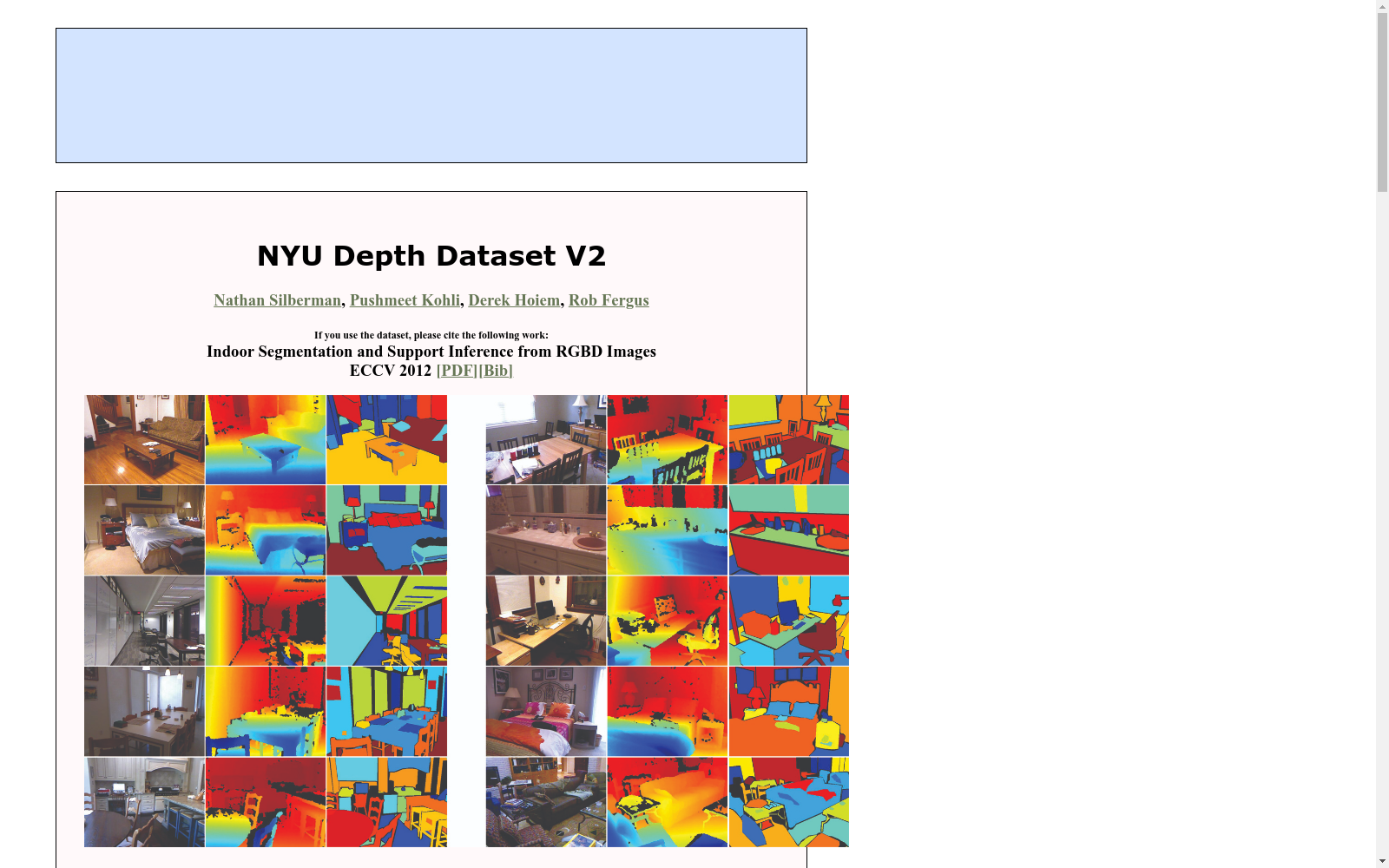
该数据集包含了从室内场景收集的RGB-D图像,旨在为深度估计研究提供支持。该数据集的任务是进行深度估计。
This dataset contains RGB-D images collected from indoor scenes, intended to support research in depth estimation. Its core task is depth estimation.
提供机构:
NYUv2
搜集汇总
数据集介绍
构建方式
NYUv2数据集的构建基于纽约大学深度学习实验室的研究项目,通过使用微软Kinect传感器在室内环境中采集图像和深度信息。数据集包含了超过1400张RGB-D图像,每张图像都附带有详细的深度图、表面法线图以及语义分割标签。这些数据是通过对多个室内场景进行多角度拍摄和标注而获得的,确保了数据集的多样性和代表性。
特点
NYUv2数据集以其丰富的多模态信息和高质量的标注著称。该数据集不仅提供了RGB图像和深度图,还包括了表面法线图和语义分割标签,这些信息为计算机视觉研究提供了全面的数据支持。此外,数据集中的图像涵盖了多种室内环境,如客厅、厨房和卧室,使得研究者可以在不同场景下验证和优化算法。
使用方法
NYUv2数据集广泛应用于计算机视觉领域的多个研究方向,包括但不限于深度估计、语义分割、物体识别和场景理解。研究者可以通过下载数据集并使用相应的工具包进行数据预处理和模型训练。数据集的多样性和高质量标注使其成为评估和比较不同算法性能的理想基准。此外,NYUv2数据集的开源性质也促进了学术界和工业界的广泛应用和合作。
背景与挑战
背景概述
NYUv2数据集,由纽约大学于2012年创建,主要研究人员包括Nathan Silberman和Rob Fergus等。该数据集的核心研究问题集中在室内场景的深度估计和语义分割,旨在为计算机视觉领域提供一个高质量的基准。NYUv2包含超过1400张RGB-D图像,每张图像都标注了详细的深度信息和语义标签,极大地推动了深度学习和计算机视觉技术在室内环境中的应用。其影响力不仅体现在学术研究中,还对智能家居、机器人导航等实际应用领域产生了深远影响。
当前挑战
尽管NYUv2数据集在室内场景分析中具有重要地位,但其构建和应用过程中仍面临诸多挑战。首先,数据集的规模相对较小,难以满足现代深度学习模型对大数据的需求。其次,室内环境的复杂性和多样性使得深度估计和语义分割任务异常复杂,尤其是在光照变化、物体遮挡和视角差异等情况下。此外,数据集的标注过程耗时且成本高昂,如何提高标注效率和准确性是一个持续的挑战。最后,随着技术的进步,如何更新和扩展NYUv2数据集以适应新的研究需求,也是一个亟待解决的问题。
发展历史
创建时间与更新
NYUv2数据集由纽约大学于2012年创建,旨在为深度学习研究提供一个多任务、多模态的数据集。该数据集在创建后经过多次更新,以适应不断发展的计算机视觉研究需求。
重要里程碑
NYUv2数据集的发布标志着多任务学习在计算机视觉领域的重要突破。其首次整合了深度、表面法线、语义分割等多种任务,为研究人员提供了一个统一的基准。此外,NYUv2还引入了室内场景的RGB-D图像,极大地丰富了数据集的多样性和应用场景。这一创新不仅推动了深度学习算法的发展,也为后续的多模态数据集设计提供了宝贵的参考。
当前发展情况
当前,NYUv2数据集已成为计算机视觉领域的重要基准之一,广泛应用于深度估计、语义分割、物体识别等多个研究方向。随着深度学习技术的不断进步,NYUv2数据集也在不断更新和扩展,以适应新的研究需求。其在多任务学习、多模态数据融合等方面的贡献,为计算机视觉领域的研究提供了坚实的基础。此外,NYUv2的成功经验也激励了更多研究者开发类似的多任务、多模态数据集,进一步推动了该领域的技术进步。
发展历程
- NYUv2数据集首次发表,由纽约大学计算机科学系的研究团队创建,主要用于深度学习和计算机视觉研究。
- NYUv2数据集首次应用于深度学习领域,特别是在语义分割和深度估计任务中,展示了其在多任务学习中的潜力。
- NYUv2数据集被广泛应用于各种计算机视觉挑战赛中,成为评估算法性能的标准数据集之一。
- 随着深度学习技术的进步,NYUv2数据集的应用范围扩展到自动驾驶和机器人导航等领域,进一步验证了其数据质量和多样性。
- NYUv2数据集的扩展版本发布,增加了更多的场景和标注信息,以适应不断发展的研究需求。
常用场景
经典使用场景
在计算机视觉领域,NYUv2数据集以其丰富的室内场景图像和深度信息而著称。该数据集广泛应用于场景理解、物体识别和深度估计等经典任务。通过提供多视角的RGB-D图像,NYUv2为研究人员提供了一个理想的平台,以探索和验证各种视觉算法在复杂室内环境中的表现。
衍生相关工作
基于NYUv2数据集,许多经典工作得以展开。例如,研究人员开发了多种深度估计和场景分割算法,显著提升了室内场景理解的精度。此外,NYUv2还激发了多模态数据融合的研究,推动了RGB-D图像处理技术的发展。这些衍生工作不仅丰富了计算机视觉的理论体系,也为实际应用提供了强有力的技术支持。
数据集最近研究
最新研究方向
在计算机视觉领域,NYUv2数据集因其丰富的多模态数据(包括RGB图像、深度图和语义标签)而备受关注。最新研究方向主要集中在利用深度学习和多模态融合技术,提升场景理解与物体识别的准确性。研究者们通过引入自监督学习和迁移学习方法,进一步挖掘数据集中的潜在信息,以应对复杂场景中的挑战。此外,NYUv2数据集还被广泛应用于增强现实和自动驾驶等前沿领域,推动了相关技术的快速发展和实际应用。
相关研究论文
- 1Indoor Segmentation and Support Inference from RGBD ImagesNew York University · 2012年
- 2Depth Map Prediction from a Single Image using a Multi-Scale Deep NetworkUniversity of Toronto · 2014年
- 3Learning to Segment Every ThingFacebook AI Research · 2018年
- 4DensePose: Dense Human Pose Estimation In The WildFacebook AI Research · 2018年
- 5Monocular Depth Estimation Using Neural Regression ForestUniversity of California, Merced · 2016年
以上内容由遇见数据集搜集并总结生成


