GRIP
收藏arXiv2025-03-07 更新2025-03-11 收录
下载链接:
https://bell0o.github.io/GRIP/
下载链接
链接失效反馈官方服务:
资源简介:
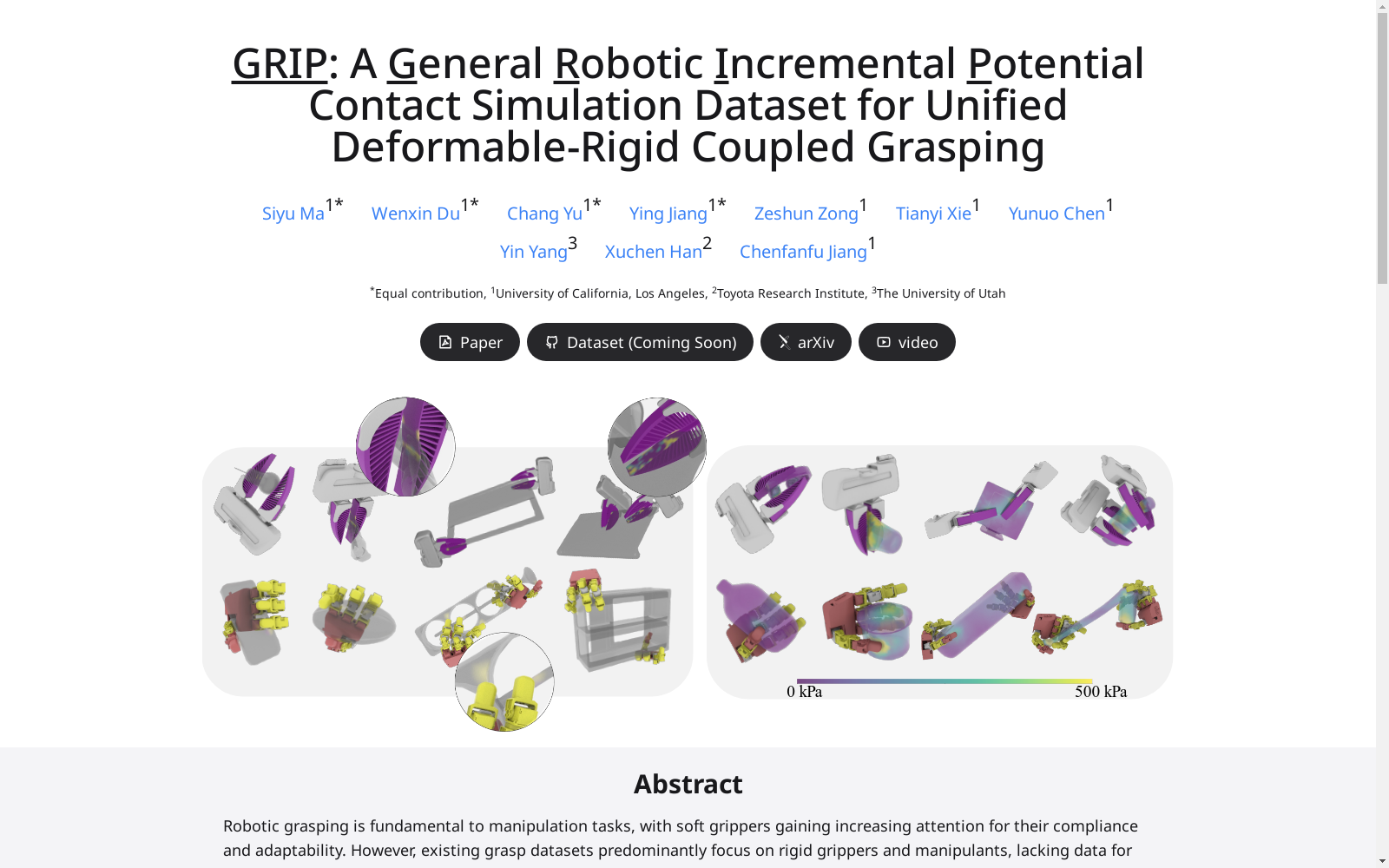
GRIP数据集是一个大规模、通用的抓取数据集,由加州大学洛杉矶分校的AIVC实验室创建。该数据集包含100K高质量抓取姿态,涵盖不同场景下的软性UMI夹爪和刚性LEAP手与刚性及软性物体的交互。数据集记录了丰富的物体形状、大小和材料,以及高保真摩擦接触下的夹爪和物体的变形和应力分布。这个数据集可以用于神经抓取生成和应力场预测等应用。
The GRIP dataset is a large-scale, general-purpose grasping dataset developed by the AIVC Laboratory at the University of California, Los Angeles (UCLA). It encompasses 100,000 high-quality grasping poses, covering interactions between the soft UMI gripper and rigid LEAP hand, as well as their contacts with both rigid and soft objects across diverse scenarios. The dataset records rich variations in object geometries, dimensions and material compositions, alongside the deformation and stress distributions of both grippers and objects under high-fidelity frictional contact conditions. This dataset enables applications such as neural grasping generation and stress field prediction.
提供机构:
加州大学洛杉矶分校(AIVC实验室)
创建时间:
2025-03-07
搜集汇总
数据集介绍
构建方式
GRIP数据集的构建采用了一种优化的增量势接触(IPC)模拟器,用于多环境数据生成,实现了高达48倍的速度提升,同时确保了在柔顺抓取器和可变形对象模拟中的高效、无交点和无翻转的模拟。该数据集的构建过程涉及将抓取器和对象转换为模拟就绪的资产,使用抓取合成算法生成候选抓取姿态,并通过IPC模拟器进行评估。不稳定的抓取姿态会被过滤掉,从而确保了数据集的质量和实用性。
使用方法
使用GRIP数据集的方法包括通过候选抓取姿态生成、模拟和评估的自动化流程。该流程首先使用GPD和DexGraspNet算法生成候选抓取姿态,然后使用IPC模拟器进行评估,并过滤掉不稳定的抓取姿态。数据集还支持各种类型的抓取器(平行和灵巧、刚性和软性)和抓取对象(刚性和软性)的单手和双手抓取设置。此外,GRIP数据集还可以用于神经抓取生成和应力场预测等应用,以促进机器人操作、软抓取器控制和基于物理的模拟研究。
背景与挑战
背景概述
GRIP数据集是一项重要的研究进展,旨在推动机器人抓取技术的发展。该数据集由Siyu Ma、Wenxin Du等研究人员于2025年3月发布,由美国加州大学洛杉矶分校(UCLA)的AIVC实验室主导。GRIP数据集专注于模拟软体和刚性抓取器与刚性及软体物体之间的抓取交互,旨在解决现有数据集中缺乏可扩展和鲁棒的模拟流程的问题,从而限制了对柔顺抓取器和软体操作对象通用模型的开发。GRIP数据集的创建对机器人操作、柔顺抓取器控制和基于物理的模拟研究具有重要意义。
当前挑战
GRIP数据集面临的挑战包括:(1)模拟软体抓取器和变形对象之间的复杂交互,这需要高保真度的摩擦接触模拟和精确的物理动态模拟;(2)构建一个可扩展的模拟器,能够处理大规模数据集的生成,同时保持高效的计算性能;(3)开发一个自动化的抓取生成、模拟和评估流程,以支持不同类型的抓取器和操作对象;(4)确保生成的抓取姿态在实际应用中稳定可靠,并能有效预测软体操作对象的应力场分布。为了应对这些挑战,研究人员开发了基于增量势接触(IPC)的优化模拟器,实现了并行环境下的高效模拟,并通过GPU并行化提高了计算效率。此外,还构建了一个全自动的流程,用于抓取生成、模拟和评估,以支持各种抓取器和操作对象。
常用场景
经典使用场景
GRIP数据集是一个包含100,000个高质量抓握的通用抓握数据集,跨越各种场景。它包括软性UMI抓握器和刚性LEAP手,在与刚性和软性物体交互时,在单手和双手设置下进行抓握。我们的数据集捕捉了各种各样的物体形状、大小和材料,以及丰富的物体和抓握器变形和应力分布,由具有高保真摩擦接触的IPC模拟器捕获。
解决学术问题
GRIP数据集解决了由于缺乏可扩展、鲁棒的模拟管道,大多数现有数据集排除了可变形体的问题,从而限制了符合性抓握器和软性操纵器的通用模型的开发。GRIP利用优化的增量势接触(IPC)模拟器进行多环境数据生成,在保证效率、无交叉和无翻转模拟的同时,实现了高达48倍的加速。我们的全自动流程生成了1,200个对象和100,000个抓握姿势的多样化抓握交互,并包含软性和刚性抓握器。
实际应用
GRIP数据集在神经抓握生成和软性操纵器的应力场预测方面具有实际应用。数据集支持各种类型的抓握器(平行和多才多艺,刚性和软性)和操纵器(刚性和软性)的单手和双手抓握设置,为机器人操作、软性抓握器控制和物理驱动模拟的研究提供了先进的数据支持。
数据集最近研究
最新研究方向
GRIP数据集的最新研究方向集中在通用抓取模拟领域,特别是针对软体抓取器和变形物体的模拟。该数据集通过优化增量势接触(IPC)方法,实现了大规模、多环境数据生成的模拟,速度提高了48倍,同时确保了模拟的准确性和高效性。GRIP数据集的生成采用了全自动的流程,包括抓取生成、模拟和评估,支持多种抓取器和操作物体的类型。该数据集的发布为神经抓取生成和应力场预测等应用提供了强大的支持,推动了机器人操作、软体抓取器控制和物理驱动模拟等领域的研究进展。
相关研究论文
- 1GRIP: A General Robotic Incremental Potential Contact Simulation Dataset for Unified Deformable-Rigid Coupled Grasping加州大学洛杉矶分校(AIVC实验室) · 2025年
以上内容由遇见数据集搜集并总结生成


