Continuous Perception Benchmark
收藏arXiv2024-08-15 更新2024-08-17 收录
下载链接:
https://ai.stanford.edu/~zywang/projects/ContinuousPerceptionBenchmark
下载链接
链接失效反馈官方服务:
资源简介:
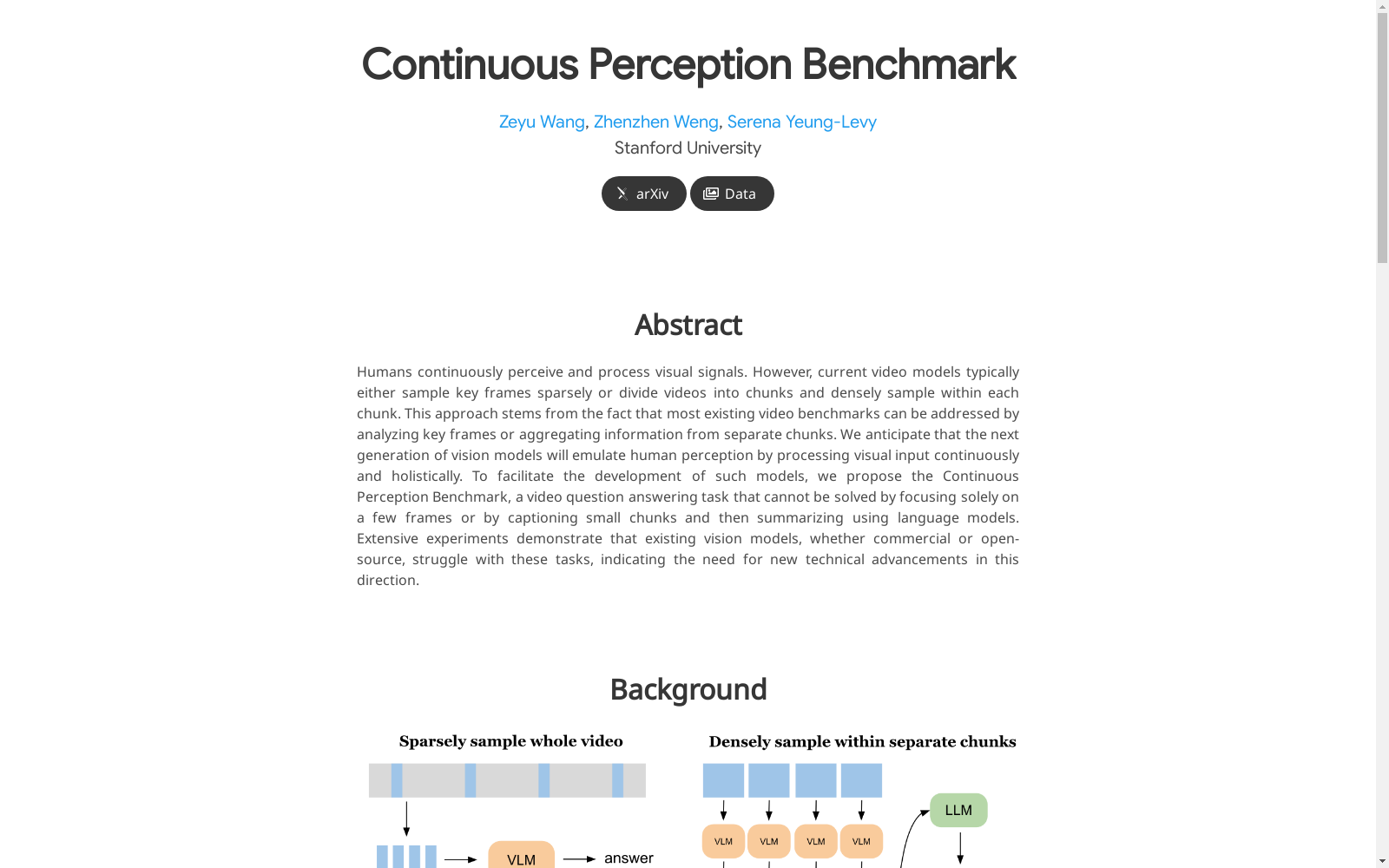
Continuous Perception Benchmark数据集由斯坦福大学创建,旨在推动视频理解模型的连续感知能力。该数据集包含200个视频实例,每个视频时长20秒,帧率为30fps,涵盖10个不同的物体类别。数据集通过模拟环境OmniGibson生成,要求模型连续处理视频以准确计数特定物体,模拟人类连续视觉处理的过程。该数据集主要用于评估和促进模型在复杂视频内容中进行精确物体识别和计数的能力。
The Continuous Perception Benchmark dataset was created by Stanford University, aiming to advance the continuous perception capabilities of video understanding models. This dataset includes 200 video instances, each with a duration of 20 seconds and a frame rate of 30 fps, covering 10 distinct object categories. Generated using the OmniGibson simulation environment, the dataset requires models to process videos continuously to accurately count specific objects, simulating the process of human continuous visual processing. It is primarily used to evaluate and improve the ability of models to perform precise object recognition and counting in complex video content.
提供机构:
斯坦福大学创建时间:
2024-08-15
搜集汇总
数据集介绍
构建方式
Continuous Perception Benchmark(CPB)数据集的构建基于OmniGibson仿真环境,该环境依托于NVIDIA的Omniverse平台。研究人员在3D场景中布置了家具和随机摆放的物体,并通过移动摄像机沿特定轨迹捕捉视频。每个视频时长为20秒,帧率为30fps,确保视觉数据的连续性和空间上下文的完整性。数据生成过程中,摄像机以恒定速度移动,捕捉全景视角,要求模型在处理视频时能够密集且连续地分析整个场景。
使用方法
CPB数据集的使用方法主要围绕视频问题回答任务展开。模型需要观察视频中的物体,并回答特定类别的物体数量。评估时采用多种指标,包括平均绝对误差(MAE)、均方根误差(RMSE)以及不同误差范围内的准确率(如OBZ、OBO、OBF)。这些指标能够全面衡量模型在连续感知任务中的表现。实验表明,现有模型在该任务上表现不佳,凸显了开发新技术的必要性。
背景与挑战
背景概述
Continuous Perception Benchmark(CPB)是由斯坦福大学的研究人员Zeyu Wang、Zhenzhen Weng和Serena Yeung-Levy于2024年提出的一个视频问答任务数据集。该数据集的提出旨在推动下一代视觉模型的发展,使其能够像人类一样连续、全面地处理视觉输入。现有的视频理解模型通常通过稀疏采样关键帧或将视频分割成块进行处理,而CPB则要求模型对视频进行连续感知,以解决无法通过关键帧或局部信息聚合完成的任务。这一数据集的出现标志着视频理解领域的一个重要转折点,旨在推动模型在时间连续性、全局信息整合等方面的技术进步。
当前挑战
CPB面临的挑战主要体现在两个方面。首先,现有的视频理解模型在处理视频时通常依赖于稀疏采样或分块处理,这导致模型无法捕捉视频中的全局时间信息,进而影响其对复杂场景的理解能力。CPB要求模型具备连续感知能力,这对现有模型提出了更高的要求,尤其是在处理长视频时,模型需要有效地整合跨时间的视觉信息。其次,数据集的构建过程中也面临挑战,包括如何生成具有连续性和复杂性的视频数据,以及如何设计合理的评估指标来衡量模型的连续感知能力。这些挑战不仅推动了视频理解技术的发展,也为未来的研究提供了新的方向。
常用场景
经典使用场景
Continuous Perception Benchmark(CPB)主要用于视频问答任务,要求模型对输入视频进行连续、密集的处理,而不是通过稀疏采样或分块处理来提取信息。该数据集通过模拟人类视觉感知的方式,推动下一代视觉模型的发展,使其能够像人类一样连续地感知和处理视觉信号。
解决学术问题
CPB解决了当前视频理解模型在处理视频时依赖稀疏采样或分块处理的局限性问题。现有的视频模型通常通过分析关键帧或分块处理来提取信息,而CPB则要求模型对视频进行连续处理,从而避免了全局时间信息的丢失。这一数据集为开发能够模拟人类视觉感知的模型提供了新的挑战和方向。
实际应用
CPB的实际应用场景包括智能家居、自动驾驶和机器人视觉等领域。在这些场景中,系统需要连续处理视频流以理解环境中的物体数量、位置和动态变化。例如,家庭机器人可以通过连续感知视频流来识别房间中的家具和物品,从而更好地执行任务。
数据集最近研究
最新研究方向
在计算机视觉领域,视频理解一直是研究的核心任务之一。近年来,随着多模态基础模型的兴起,视频理解技术取得了显著进展。然而,现有的视频模型在处理视频时通常采用稀疏采样或分块处理的方式,这与人类连续感知视觉信号的方式存在显著差异。为了推动新一代视觉模型的发展,斯坦福大学的研究团队提出了Continuous Perception Benchmark(CPB),旨在通过要求模型连续处理整个视频流来回答问题,从而模拟人类的视觉感知能力。这一基准测试挑战了现有模型的局限性,尤其是在处理全局时间信息和复杂视觉概念(如组合性、直觉物理和物体持久性)方面的不足。通过这一基准,研究者希望推动开发出能够更接近人类感知能力的视觉模型,从而在真实世界的应用中实现更高效的视频理解。
相关研究论文
- 1Continuous Perception Benchmark斯坦福大学 · 2024年
以上内容由遇见数据集搜集并总结生成
暂无相关数据集


