UrbanLoco
收藏arXiv2020-04-03 更新2024-06-21 收录
下载链接:
https://advdataset2019.wixsite.com/urbanloco
下载链接
链接失效反馈官方服务:
资源简介:
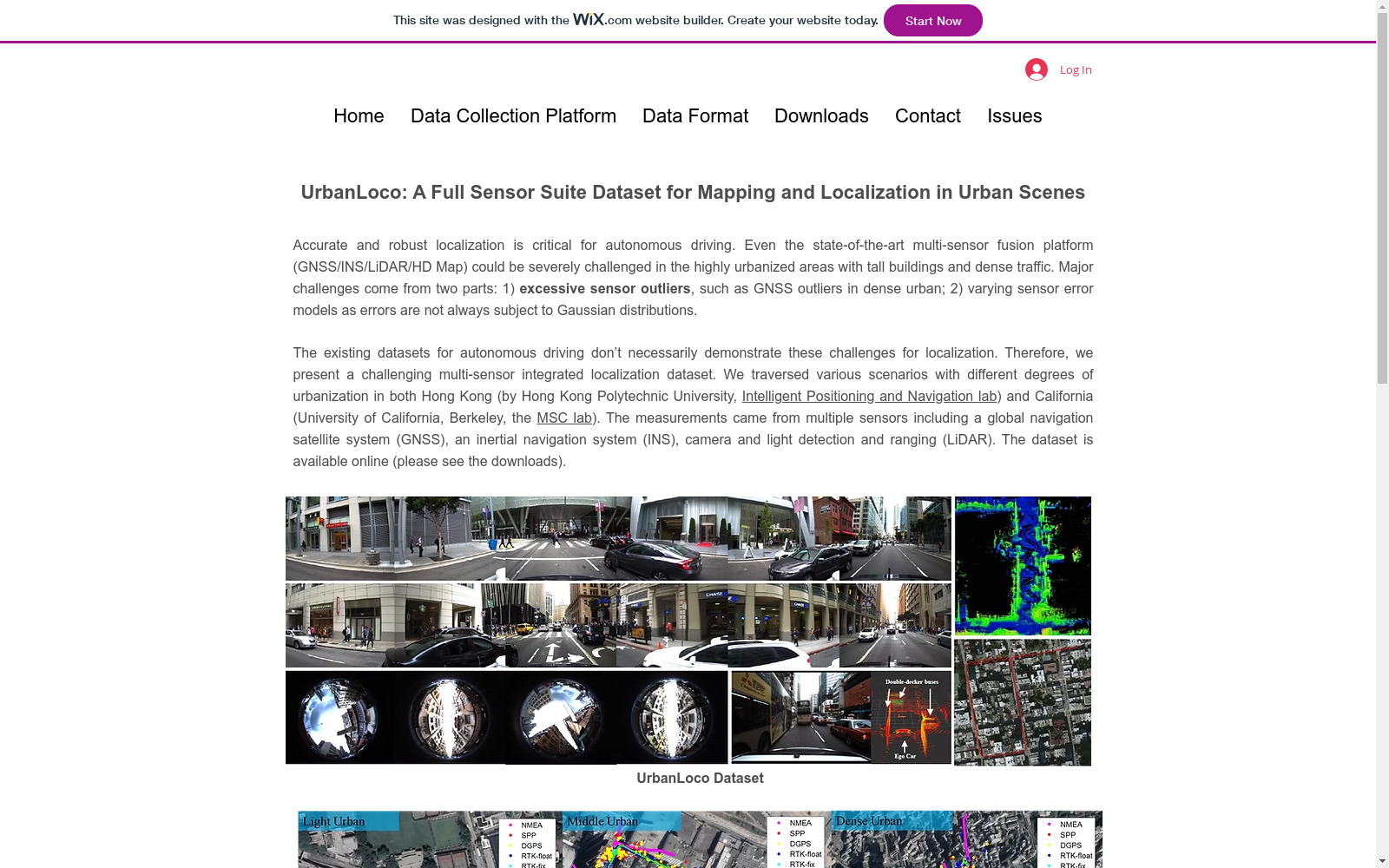
UrbanLoco数据集是由香港理工大学和加州大学伯克利分校合作创建,专注于高度城市化地区的映射和定位问题。该数据集包含13条轨迹,总长度超过40公里,覆盖了包括城市峡谷、桥梁、隧道等多种城市地形。数据集通过配备的全传感器套件(包括LIDAR、相机、IMU和GNSS接收器)收集,旨在解决城市环境中由于高楼和动态物体导致的映射和定位难题。UrbanLoco数据集的创建过程涉及在繁忙的城市区域进行详细的数据采集,其应用领域主要集中在自动驾驶车辆的映射和定位技术上。
UrbanLoco Dataset was collaboratively created by The Hong Kong Polytechnic University and the University of California, Berkeley, focusing on mapping and localization tasks in highly urbanized regions. This dataset consists of 13 trajectories with a total length exceeding 40 kilometers, covering diverse urban terrains such as urban canyons, bridges, and tunnels. Collected using a comprehensive onboard sensor suite including LIDAR, cameras, IMU, and GNSS receivers, it aims to address the challenges of mapping and localization in urban environments caused by high-rise buildings and dynamic objects. The development of the UrbanLoco dataset involved detailed data collection in busy urban areas, and its primary application scenarios are centered on mapping and localization technologies for autonomous vehicles.
提供机构:
智能定位与导航实验室,香港理工大学 机械系统控制实验室,加州大学伯克利分校
创建时间:
2019-12-20
搜集汇总
数据集介绍
构建方式
UrbanLoco数据集是在高度城市化环境中收集的,旨在解决城市环境中的定位和建图问题。该数据集由香港理工大学智能定位与导航实验室和加州大学伯克利分校机械系统控制实验室共同收集,涵盖旧金山和香港两个城市的13条轨迹,总长度超过40公里。数据收集平台包括LIDAR、摄像头、IMU和GNSS接收器,所有传感器都经过仔细校准,并提供校准日志。数据集还提供了Novatel SPAN-CPT导航系统的地面真值,该系统集成了RTK校正的GNSS信号和IMU测量。
使用方法
使用UrbanLoco数据集进行定位和建图研究时,用户可以访问数据集网站下载数据,并使用提供的API进行数据处理和分析。数据集提供了全面的传感器信息,包括LIDAR点云、摄像头图像、IMU数据和GNSS数据,用户可以根据需要选择合适的算法进行处理。此外,数据集还提供了地面真值,用于评估算法的性能。在使用数据集时,用户应注意数据集的版权和使用协议,并确保数据的安全性和隐私性。
背景与挑战
背景概述
在自动驾驶领域,地图构建和定位是至关重要的模块。尽管全球导航卫星系统(GNSS)在定位领域取得了显著的成就,但高度城市化的场景仍然是一个挑战。现有的公共数据集要么没有充分解决城市挑战,要么没有提供足够与地图构建和定位相关的传感器信息。为了解决这一问题,UrbanLoco数据集被创建,它是一个在高度城市化的环境中收集的全传感器套件地图/定位数据集。该数据集包括在旧金山和香港收集的13条轨迹,总长度超过40公里,涵盖了城市峡谷、桥梁、隧道、急转弯等各种城市地形。更重要的是,该数据集包括来自LIDAR、摄像头、IMU和GNSS接收器的信息。UrbanLoco数据集的创建为自动驾驶研究提供了宝贵的资源,并推动了城市地图构建和定位技术的发展。
当前挑战
UrbanLoco数据集面临的挑战包括:1)城市场景中地图构建和定位的挑战,由于高楼大厦和众多动态物体,城市中的地图构建和定位非常困难,城市中的同时定位和地图构建(SLAM)甚至更加困难。2)构建过程中的挑战,UrbanLoco数据集收集了来自LIDAR、摄像头、IMU和GNSS接收器的信息,这些传感器需要精确校准,以确保数据的准确性和可靠性。此外,由于城市场景中的高楼大厦和众多动态物体,数据收集过程需要克服信号丢失和多径效应等问题。
常用场景
经典使用场景
UrbanLoco数据集主要针对城市环境下的高精度地图构建和定位任务。该数据集包含了丰富的传感器数据,包括激光雷达、摄像头、惯性测量单元(IMU)和全球导航卫星系统(GNSS)接收器,这些传感器协同工作,提供了全面的环境感知能力。经典的使用场景包括城市峡谷、桥梁、隧道、急转弯等复杂场景,以及动态物体如车辆、行人、自行车等。这使得UrbanLoco成为测试和评估各种城市环境下的地图构建和定位算法的理想数据集。
解决学术问题
UrbanLoco数据集解决了城市环境中高精度地图构建和定位的难题。城市环境由于其高密度的建筑和众多的动态物体,给传统的定位技术如GNSS带来了极大的挑战。UrbanLoco数据集提供了大量的城市环境下的传感器数据,使得研究者能够开发和应用更加鲁棒的定位算法,如激光雷达里程计(LOAM)和视觉惯性里程计(VINS-MONO)。此外,UrbanLoco还引入了城市化的度量方法,定量地评估了不同数据集的城市化程度,为城市环境下的定位研究提供了新的视角。
实际应用
UrbanLoco数据集在实际应用中具有广泛的前景。自动驾驶汽车在城市环境中的导航和定位需要高精度的地图和定位技术,UrbanLoco数据集为这些技术的开发和测试提供了宝贵的数据资源。此外,UrbanLoco数据集还可以用于城市规划和交通管理,通过分析城市环境中的动态物体和行为模式,优化交通流和城市布局。
数据集最近研究
最新研究方向
UrbanLoco数据集专注于城市环境下的高精度地图构建和定位技术,特别是在高楼林立、动态物体众多的复杂场景中。该数据集为研究者在城市环境下的地图构建和定位提供了新的挑战和机遇。目前,基于该数据集的研究方向主要集中在如何有效融合激光雷达、摄像头、惯性测量单元(IMU)和全球导航卫星系统(GNSS)等多源传感器信息,以提高城市环境下定位的准确性和鲁棒性。此外,研究者也在探索如何利用该数据集评估和改进现有的SLAM算法,使其更好地适应城市环境下的定位需求。
相关研究论文
- 1UrbanLoco: A Full Sensor Suite Dataset for Mapping and Localization in Urban Scenes智能定位与导航实验室,香港理工大学 机械系统控制实验室,加州大学伯克利分校 · 2020年
以上内容由遇见数据集搜集并总结生成


