InternData-N1
收藏InternData-N1 数据集概述
许可证
- 许可证类型:Apache-2.0
关键特性
-
统一的不同基准格式
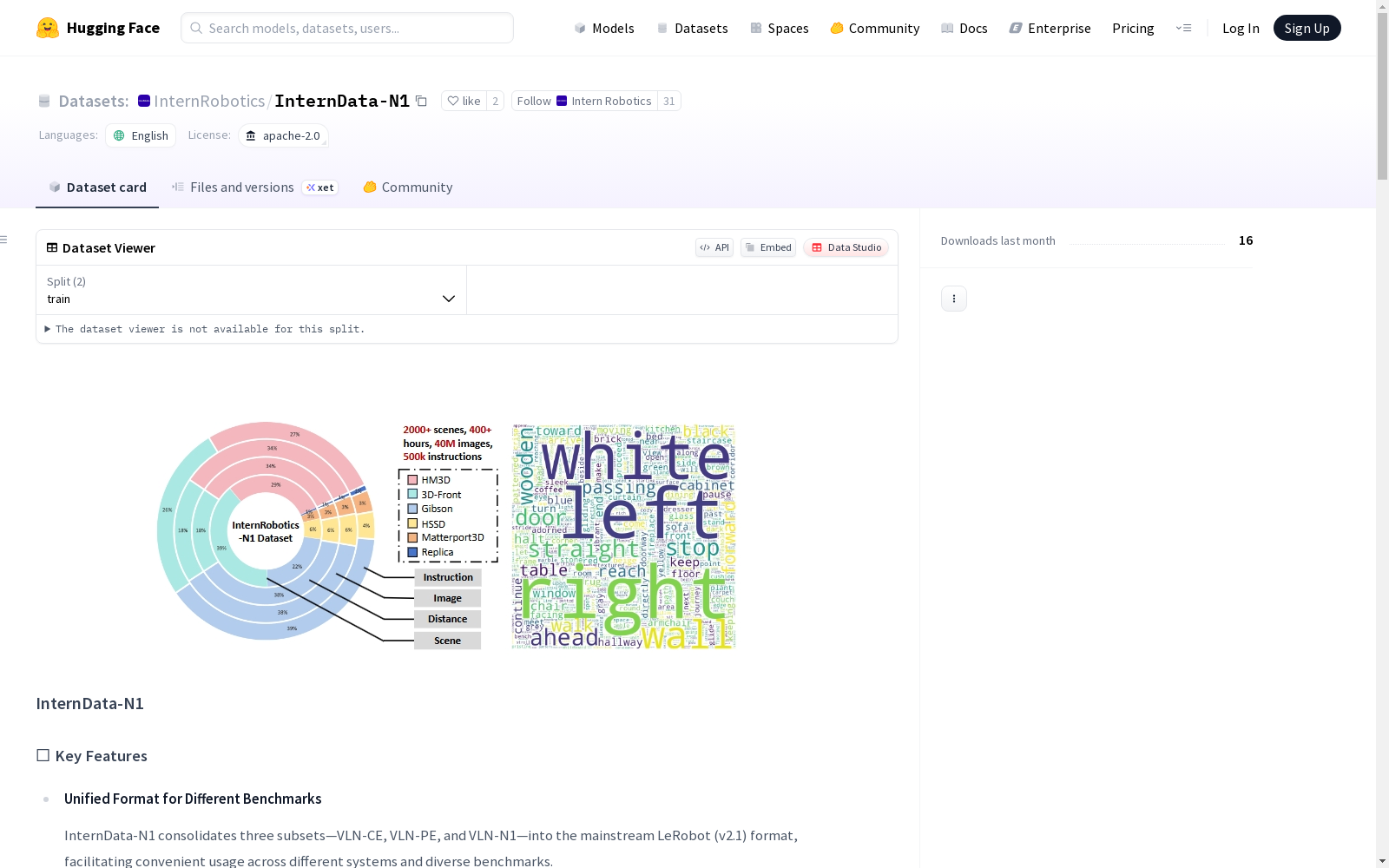
- 将VLN-CE、VLN-PE和VLN-N1三个子集整合为主流的LeRobot (v2.1)格式,便于在不同系统和多样化的基准中使用。
-
涵盖不同体现、任务和场景的多样化数据
- 基于3,000多个场景资产,提供丰富的随机化(包括不同机器人体现和视角),并通过LLM生成常见导航任务的重新表述指令。
-
通过有效生成和过滤确保高质量
- 采用有效的数据生成策略(生成平滑且安全的轨迹)和严格的过滤(排除参考对象非常少的样本),确保数据质量。
数据集结构
场景数据资产
scene_data/ ├── mp3d_pe/ ├── mp3d/ │ ├── scans │ └── tasks ├── n1_eval_scenes/ │ ├── Materials │ ├── SkyTexture │ ├── InternUtopia-Home │ └── InternUtopia-Commercial
scene_data/mp3d_pe/: 用于VLN-PE基准的改进版Matterport3D场景资产。scene_data/mp3d/scans/: 用于生成N1轨迹数据的基础Matterport3D扫描。scene_data/mp3d/tasks/: 用于VLN-CE基准的Matterport3D场景资产。scene_data/n1_eval_scenes/: 用于视觉导航(VN)基准的场景资产。
核心数据集结构
InternData-N1/ ├── vln_pe/ │ ├── raw_data/ │ │ ├── train/ │ │ ├── val_seen/ │ │ │ └── val_seen.json.gz │ │ └── val_unseen/ │ │ └── val_unseen.json.gz │ └── traj_data/ │ ├── <scene_datasets> / │ ... ├── <scene> / │ ... ├── <traj_id> / │ ... ├── data/ │ │ └── chunk-000 │ │ └── episode_000000.parquet │ ├── meta/ │ │ ├── episodes_stats.jsonl │ │ ├── episodes.jsonl │ │ ├── info.json │ │ └── tasks.jsonl #instruction_text │ └── videos │ └── chunk-000 │ ├── observation.images.depth │ └── observation.images.rgb ├── vln_ce/ │ ├── raw_data/ │ │ ├── train/ │ │ ├── val_seen/ │ │ │ └── val_seen.json.gz │ │ └── val_unseen/ │ │ └── val_unseen.json.gz │ └── traj_data/ └── vln_n1/ └── traj_data/
raw_data/: 包含每个基准的原始开放数据源,如定义任务、导航目标和数据集拆分的JSON文件。traj_data/: 包含以LeRobot (v2.1)格式处理的核心数据集。
数据集统计
| 数据集 | 样本数 | 关键特性 | 数据位置 |
|---|---|---|---|
| VLN-PE | 8,000+ | 物理现实环境 | videos/observation.images.{rgb,depth}<br>meta/tasks.jsonl |
| VLN-CE | 250,000+ | 连续环境 | videos/observation.images.rgb<br>meta/episodes.jsonl |
| VLN-N1 | 660K+指令<br>210K+视频 | 用于InternVLA-N1的合成数据 | data/<br>videos/<br>meta/trajectories.json |
引用
BibTeX @misc{interndata_n1, title={InternData-N1 Dataset}, author={InternData-N1 Dataset contributors}, howpublished={url{https://huggingface.co/datasets/InternRobotics/InternData-N1}}, year={2025} }