VDT-2048 Dataset
收藏github2024-05-19 更新2024-05-31 收录
下载链接:
https://github.com/VDT-2048/VDT-Dataset
下载链接
链接失效反馈官方服务:
资源简介:
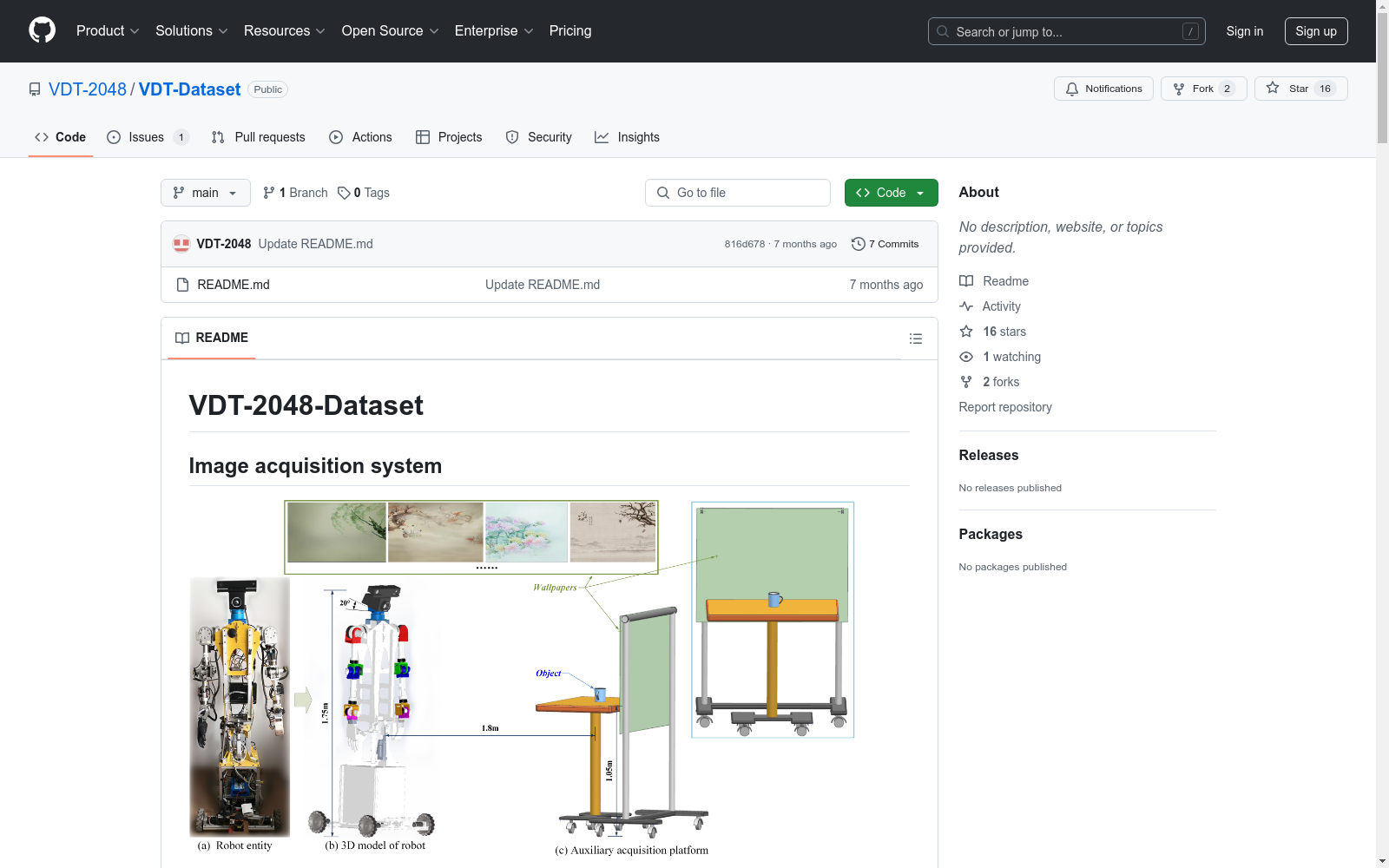
该数据集包含2048组图像,每组包含三模态图像(可见光图像、深度图像和热图像),所有图像分辨率为640×480。数据集收集了34种家庭用品在7种最常见的家庭场景中的图像。
This dataset comprises 2048 sets of images, each containing three modalities: visible light images, depth images, and thermal images, all with a resolution of 640×480. The dataset captures images of 34 types of household items in 7 of the most common domestic scenarios.
创建时间:
2022-03-19
原始信息汇总
VDT-2048数据集概述
数据集内容
- 图像数量与类型:包含2048组图像,每组图像包含三种模态:可见光图像、深度图像和热图像。
- 图像分辨率:所有图像的分辨率均为640×480。
- 场景与物品:数据集涵盖了34种家用物品,分布在7种最常见的家庭场景中。
挑战性场景
- V模态:包含七种挑战性场景,如V-SA(相似外观)、V-BSO(大显著对象)、V-SSO(小显著对象)、V-MSO(多显著对象)、V-LI(低光照)、V-SI(侧光照射)、V-NI(无光照)。
- D模态:包含四种挑战性场景,如D-BM(背景杂乱)、D-II(信息不完整)、D-SSO(小显著对象)、D-BI(背景干扰)。
- T模态:包含三种挑战性场景,如T-Cr(交叉)、T-RD(辐射分散)、T-HR(热反射)。
数据集下载
- 下载链接:数据集和代码可通过以下链接获取:下载链接
引用信息
- 论文引用:K. Song, J. Wang, Y. Bao, L. Huang and Y. Yan, "A Novel Visible-Depth-Thermal Image Dataset of Salient Object Detection for Robotic Visual Perception," in IEEE/ASME Transactions on Mechatronics, vol. 28, no. 3, pp. 1558-1569, June 2023, doi: 10.1109/TMECH.2022.3215909.
搜集汇总
数据集介绍
构建方式
VDT-2048数据集通过精心设计的图像采集系统,收集了2048组三模态图像,每组包含可见光、深度和热成像图像,分辨率均为640×480。该数据集涵盖了34种常见家用物品,并在七种典型家庭场景中进行拍摄,确保了场景和物品类别分布的多样性。此外,数据集还特别设计了多种挑战性场景,如相似外观、低光照、背景干扰等,以模拟真实世界中的复杂视觉环境,从而为机器人视觉感知提供了丰富的训练和测试数据。
使用方法
VDT-2048数据集可用于多种计算机视觉任务,特别是显著物体检测和机器人视觉感知。用户可以通过提供的下载链接获取数据集,并结合深度学习框架进行模型训练和测试。数据集中的每组图像包含三种模态,用户可以根据任务需求选择合适的模态进行融合或单独使用。此外,数据集还提供了多种挑战性场景的标注,便于研究人员评估模型在复杂环境下的性能。
背景与挑战
背景概述
VDT-2048数据集是由Song等人于2023年创建,旨在为机器人视觉感知中的显著物体检测提供一个多模态图像数据集。该数据集包含了2048组图像,每组图像包含可见光、深度和热成像三种模态,分辨率均为640×480。数据集涵盖了34种常见家用物品,并在七种典型家庭场景中进行采集,旨在模拟真实环境中的复杂视觉挑战。该数据集的发布为多模态显著物体检测研究提供了宝贵的资源,推动了机器人视觉感知技术的发展。
当前挑战
VDT-2048数据集面临的主要挑战包括:1) 多模态图像的融合与处理,如何有效整合可见光、深度和热成像信息以提高显著物体检测的准确性;2) 数据集中的复杂场景,如低光照、侧光、无光照等,这些场景增加了物体识别的难度;3) 背景干扰和信息不完整问题,特别是在深度图像中,背景杂乱和部分信息缺失会影响检测效果;4) 热成像中的交叉干扰和热辐射反射问题,这些问题使得热成像数据的处理更加复杂。这些挑战为研究者提供了丰富的研究方向,同时也对现有算法提出了更高的要求。
常用场景
经典使用场景
VDT-2048数据集的经典使用场景主要集中在多模态图像的显著性物体检测领域。该数据集包含了2048组图像,每组图像包含可见光、深度和热成像三种模态,适用于研究在复杂场景下如何有效融合多模态信息以提升显著性物体检测的准确性。特别是在处理光照不足、背景干扰等挑战性场景时,VDT-2048数据集为算法提供了丰富的测试环境,有助于推动多模态融合技术的发展。
解决学术问题
VDT-2048数据集解决了多模态图像显著性物体检测中的多个关键学术问题。首先,它通过提供多种挑战性场景(如低光照、背景干扰等),帮助研究者探索如何在复杂环境下实现精确的物体检测。其次,该数据集的多模态特性为研究多模态信息融合提供了宝贵的资源,推动了多模态学习算法的发展。此外,VDT-2048数据集还为机器人视觉感知领域的研究提供了重要的实验平台,促进了相关技术的实际应用。
实际应用
VDT-2048数据集在实际应用中具有广泛的潜力,特别是在机器人视觉感知、自动驾驶和智能监控等领域。例如,在机器人视觉感知中,该数据集可以帮助开发更精确的多模态融合算法,提升机器人在复杂环境中的物体识别能力。在自动驾驶领域,VDT-2048数据集可以用于训练和测试车辆在不同光照和天气条件下的环境感知能力。此外,在智能监控系统中,该数据集有助于提升监控设备在低光照或复杂背景下的目标检测性能。
数据集最近研究
最新研究方向
在机器人视觉感知领域,VDT-2048数据集因其多模态图像(可见光、深度、热成像)的独特性,成为显著目标检测研究的前沿焦点。最新研究方向主要集中在多模态特征融合与差异分析上,如轻量级多层次特征差异融合网络(MFDF)和多模态特征融合网络(MFFNet),这些方法旨在提升在复杂场景下的目标检测精度。此外,质量感知选择性融合网络(QSFNet)通过优化多模态数据的融合策略,进一步提高了检测性能。这些研究不仅推动了机器人视觉感知技术的发展,也为智能家居、自动驾驶等领域提供了重要的技术支持。
以上内容由遇见数据集搜集并总结生成


