MIN3D
收藏github2023-12-06 更新2024-05-31 收录
下载链接:
https://github.com/3DOM-FBK/MIN3D
下载链接
链接失效反馈官方服务:
资源简介:
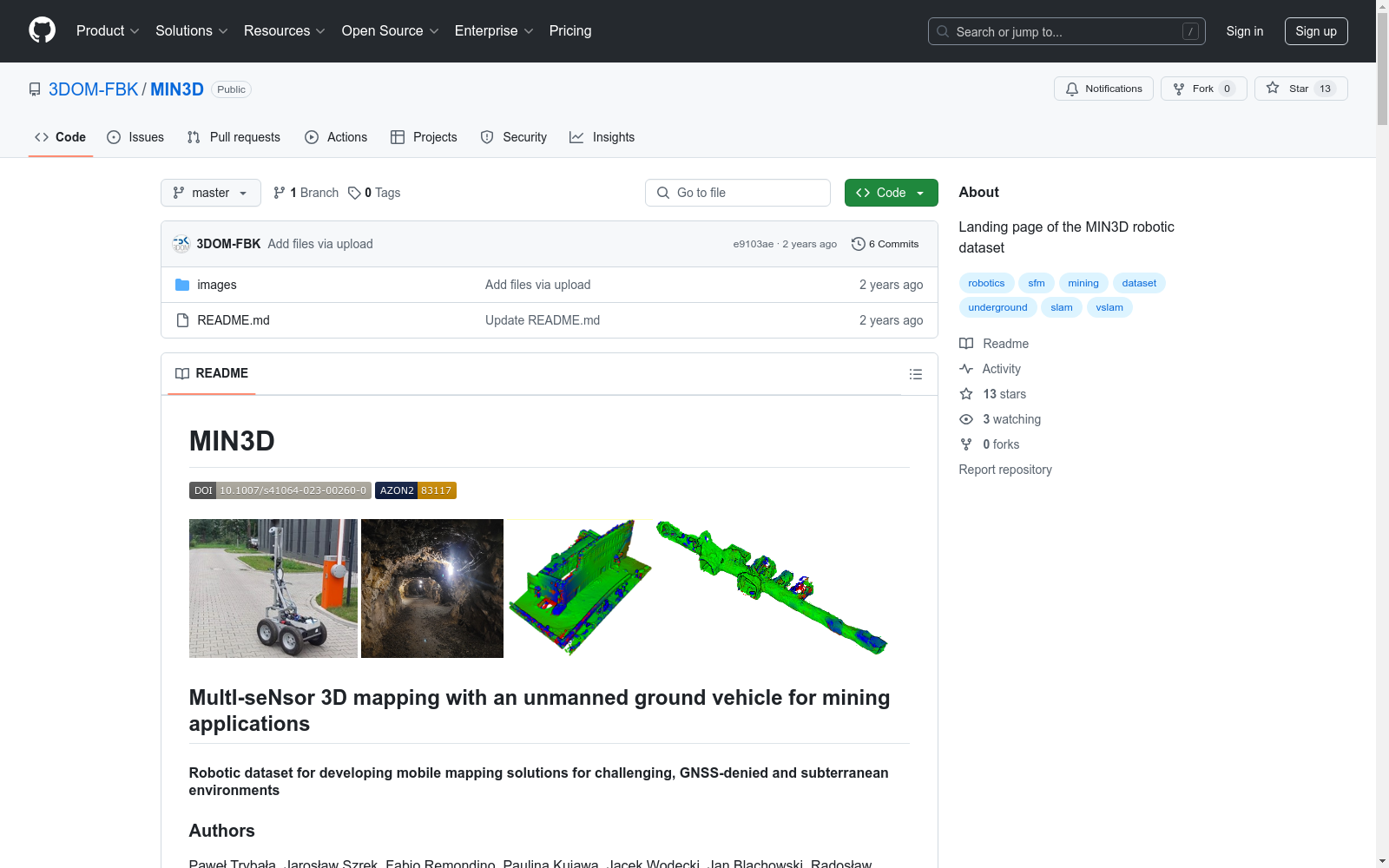
MIN3D数据集是为开发适用于挑战性、GNSS受限和地下环境的移动映射解决方案而设计的机器人数据集。该数据集通过使用轮式移动机器人在两个不同地点收集,包括大学校园内无纹理的黑暗走廊和波兰Walim的地下隧道。数据集包含约150GB的原始数据,包括多个校准的单目和立体相机、热像仪、2个激光雷达和3个惯性测量单元的图像。使用高精度地面激光扫描仪获取可靠的地面实况点云。通过公开分享此数据集,旨在支持科学界开发在具有挑战性的地下条件下进行导航和映射的稳健方法。
The MIN3D dataset is a robotic dataset designed for the development of mobile mapping solutions suitable for challenging, GNSS-constrained, and underground environments. This dataset was collected using a wheeled mobile robot at two different locations, including a featureless dark corridor on a university campus and underground tunnels in Walim, Poland. The dataset contains approximately 150GB of raw data, including images from multiple calibrated monocular and stereo cameras, a thermal camera, two LiDARs, and three inertial measurement units. Reliable ground truth point clouds were obtained using a high-precision terrestrial laser scanner. By publicly sharing this dataset, the aim is to support the scientific community in developing robust methods for navigation and mapping under challenging underground conditions.
创建时间:
2023-12-06
原始信息汇总
MIN3D 数据集概述
数据集描述
MIN3D(MultI-seNsor 3D mapping with an unmanned ground vehicle for mining applications)数据集专注于开发适用于挑战性、GNSS-否认和地下环境的移动映射解决方案。该数据集包含约150 GB的原始数据,采集自两个不同地点:大学校园内的无纹理黑暗走廊和波兰Walim的地下隧道。
传感器配置
- 相机:包括Basler立体相机、Intel RealSense RGB、Stereo和Depth相机,以及FLIR红外相机。
- LiDAR:使用Livox Horizon和Velodyne VLP-16。
- IMU:包括Livox、RealSense和NGIMU的6轴IMU。
- 地面实况3D扫描仪:使用Riegl VZ-400i,精度约为5毫米。
数据格式
- 点云:共享为.ply文件。
- RGB/IR图像:以.png文件格式提供。
- 深度图:16位整数.png图像,表示以毫米为单位的度量深度。
- IMU数据:以.csv文件格式提供。
数据序列
数据集包含8个序列,分为大学数据集和地下数据集。
大学数据集
包含3个序列,每个序列包含多种传感器数据,如Basler立体相机、RGB相机、RealSense相机、FLIR IR相机、IMU和LiDAR数据。
地下数据集
包含5个序列,每个序列同样包含多种传感器数据,包括Basler立体相机、RGB相机、RealSense相机、FLIR IR相机、IMU和LiDAR数据。
主要贡献
- 包含室内和地下条件下的挑战性场景,针对地下环境的典型问题,如可变照明、无纹理区域和复杂几何。
- 通过单一机器人平台同时获取多种传感器数据。
- 使用高精度地面实况点云,通过调查级地面激光扫描仪获取。
相关论文
- Trybała, P., Szrek, J., Remondino, F. et al. MIN3D Dataset: MultI-seNsor 3D Mapping with an Unmanned Ground Vehicle. PFG (2023).
- Trybała, P., Szrek, J., Remondino, F. et al. CALIBRATION OF A MULTI-SENSOR WHEELED ROBOT FOR THE 3D MAPPING OF UNDERGROUND MINING TUNNELS. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci., XLVIII-2/W2-2022, 135–142 (2022).
搜集汇总
数据集介绍
构建方式
MIN3D数据集通过轮式移动机器人在两个不同地点收集数据,分别是大学校园内的无纹理暗走廊和波兰Walim的地下隧道。数据采集过程中使用了多种传感器,包括多个单目和立体相机、热成像相机、2个LiDAR和3个惯性测量单元(IMU)。为了确保数据的准确性,研究团队还使用了高精度的地面激光扫描仪(TLS)获取参考点云数据。整个数据集包含约150GB的原始数据,涵盖了多种传感器同步采集的信息,为地下环境的导航和地图构建提供了丰富的实验材料。
特点
MIN3D数据集的特点在于其涵盖了极具挑战性的室内和地下环境,包括光照变化大、无纹理区域以及复杂的几何结构。数据集不仅包含了多传感器同步采集的数据,还提供了高质量的地面真值点云,这些点云通过高精度的地面激光扫描仪获取,确保了数据的可靠性和准确性。此外,数据集还包含了多个数据序列,每个序列都记录了不同的环境特征和传感器数据,为研究人员提供了多样化的实验场景。
使用方法
MIN3D数据集的使用方法较为灵活,研究人员可以根据需求选择不同的数据序列进行实验。数据集中的传感器数据以多种格式提供,包括点云数据(.ply文件)、RGB/IR图像(.png文件)、深度图(16位整数的.png文件)以及IMU数据(.csv文件)。研究人员可以利用这些数据开发和测试视觉和LiDAR同步定位与地图构建(SLAM)算法,尤其是在GNSS受限的地下环境中。此外,数据集还提供了校准数据,方便用户进行传感器数据的对齐和融合。
背景与挑战
背景概述
MIN3D数据集由Paweł Trybała等研究人员于2023年创建,旨在推动移动测绘技术在复杂环境中的应用,特别是在GNSS信号受限的地下环境中。该数据集由波兰的多个研究机构合作开发,主要应用于采矿和地下环境的三维测绘。数据集通过无人地面车辆(UGV)在两个不同地点采集,包括大学校园的无纹理黑暗走廊和波兰Walim的地下隧道。数据集包含约150GB的原始数据,涵盖多传感器同步采集的图像、热成像、LiDAR和惯性测量单元(IMU)数据,并提供了高精度的地面真值点云。该数据集的发布为科学界提供了宝贵的资源,支持在复杂环境中导航与测绘算法的开发与验证。
当前挑战
MIN3D数据集旨在解决地下环境中移动测绘的挑战,包括光照变化、无纹理区域、复杂几何结构等问题。这些环境对传统的视觉和LiDAR算法提出了严峻的考验,尤其是在特征提取和匹配方面。数据集的构建过程中,研究人员面临了多传感器同步校准、数据采集的硬件成本以及复杂环境下的数据质量保证等挑战。此外,地下环境的不可预测性和恶劣条件增加了数据采集的难度,如何确保数据的一致性和精度成为关键问题。通过提供多传感器融合的数据,MIN3D为相关领域的研究提供了新的基准,但也对算法的鲁棒性和适应性提出了更高的要求。
常用场景
经典使用场景
MIN3D数据集在移动测绘技术领域具有广泛的应用,尤其是在地下和室内外混合环境中。该数据集通过多传感器融合技术,提供了丰富的多模态数据,包括视觉、激光雷达和惯性测量单元(IMU)数据。这些数据为研究人员开发复杂的同步定位与地图构建(SLAM)算法提供了坚实的基础,尤其是在GNSS信号缺失的复杂环境中。
解决学术问题
MIN3D数据集解决了移动测绘领域中的多个关键学术问题。首先,它提供了高质量的地面真实点云数据,使得研究人员能够准确评估其算法的性能。其次,数据集涵盖了极具挑战性的场景,如光照变化大、纹理缺失或重复几何结构的环境,这为开发鲁棒的导航和地图构建算法提供了宝贵的实验平台。此外,数据集的多传感器同步采集特性为多模态数据融合研究提供了丰富的素材。
衍生相关工作
MIN3D数据集已经催生了一系列相关研究工作,尤其是在SLAM算法和多传感器融合领域。例如,基于该数据集的研究提出了改进的视觉-激光雷达融合算法,显著提高了在纹理缺失环境中的定位精度。此外,一些研究还利用该数据集开发了新型的深度学习模型,用于处理复杂环境中的多模态数据,进一步推动了移动测绘技术的发展。
以上内容由遇见数据集搜集并总结生成


