LLM-MARS_QA
收藏数据集概述
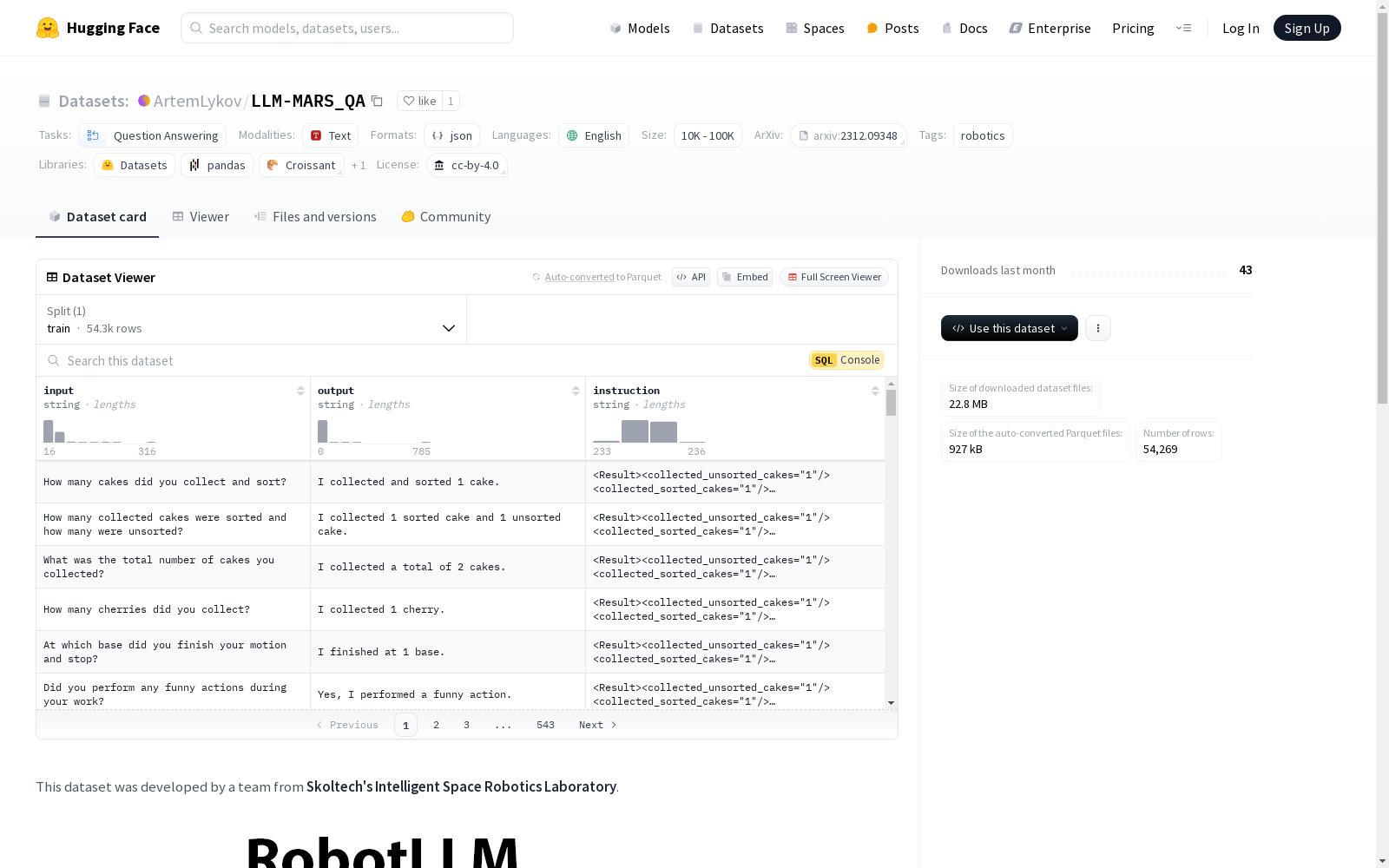
基本信息
- 许可证: cc-by-4.0
- 任务类别: question-answering
- 语言: en
- 标签: robotics
- 数据规模: 100K<n<1M
开发团队
- 开发机构: Skoltechs Intelligent Space Robotics Laboratory
应用场景
- 应用: 用于训练基于游戏结果的LLM for Question Answering Module
- 关联模型: 该模型是用于狗机器人的多智能体人工智能系统的一部分,相关描述见LLM-MARS paper
引用信息
-
论文预印本引用: bibtex @misc{lykov2023llmmarslargelanguagemodel, title={LLM-MARS: Large Language Model for Behavior Tree Generation and NLP-enhanced Dialogue in Multi-Agent Robot Systems}, author={Artem Lykov and Maria Dronova and Nikolay Naglov and Mikhail Litvinov and Sergei Satsevich and Artem Bazhenov and Vladimir Berman and Aleksei Shcherbak and Dzmitry Tsetserukou}, year={2023}, eprint={2312.09348}, archivePrefix={arXiv}, primaryClass={cs.RO}, url={https://arxiv.org/abs/2312.09348}, }
-
数据集引用: bibtex @misc{LLM-MARS_QA, title={LLM-MARS_QA}, author={Artem Lykov and Maria Dronova and Nikolay Naglov and Mikhail Litvinov and Sergei Satsevich and Artem Bazhenov and Vladimir Berman and Aleksei Shcherbak and Dzmitry Tsetserukou}, year={2024}, publisher={Hugging Face}, howpublished={url{https://huggingface.co/datasets/ArtemLykov/LLM-MARS_QA}} }