Benchmark for Autonomous Robot Navigation (BARN)
收藏arXiv2020-11-03 更新2024-07-25 收录
下载链接:
https://www.cs.utexas.edu/~xiao/BARN/BARN.html
下载链接
链接失效反馈官方服务:
资源简介:
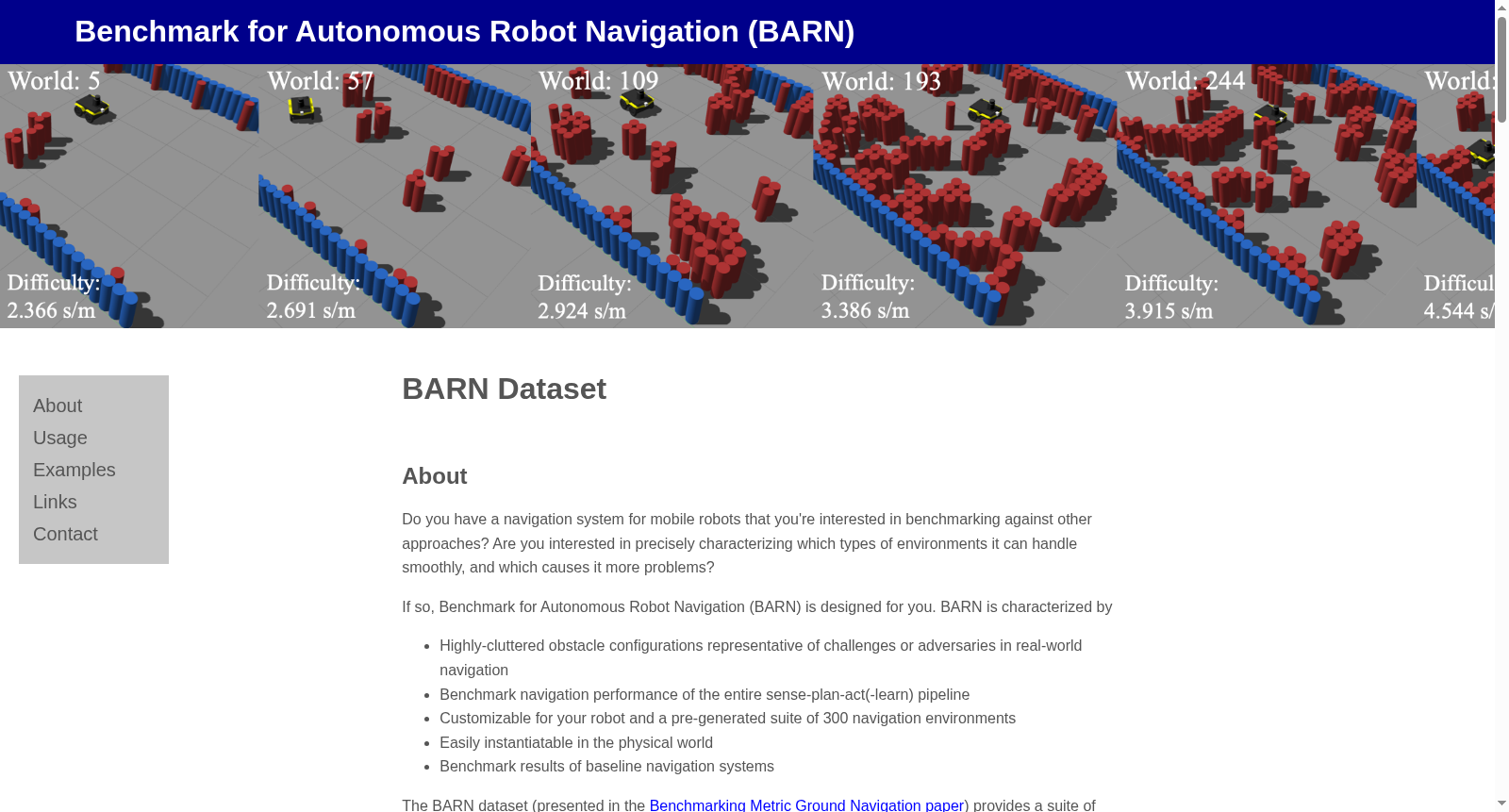
Benchmark for Autonomous Robot Navigation (BARN)数据集由德克萨斯大学奥斯汀分校计算机科学系创建,包含300个模拟导航环境,用于评估和比较不同自主移动机器人导航系统的性能。该数据集通过细胞自动机方法生成,涵盖多种难度级别的障碍环境。数据集的创建过程中,使用了多种难度量化指标,并通过学习函数逼近器来综合这些指标,以评估特定环境的导航难度。BARN数据集适用于预测新环境的导航难度、比较不同导航系统,并可作为基于规划和学习的导航系统的成本函数和课程。
The Benchmark for Autonomous Robot Navigation (BARN) dataset was developed by the Department of Computer Science at The University of Texas at Austin. It comprises 300 simulated navigation environments designed to evaluate and compare the performance of various autonomous mobile robot navigation systems. Generated using cellular automaton methods, this dataset covers obstacle environments with multiple difficulty levels. During the dataset creation process, multiple difficulty quantification metrics were adopted, and a learned function approximator was utilized to synthesize these metrics for assessing the navigation difficulty of specific environments. The BARN dataset is suitable for predicting the navigation difficulty of new environments, comparing different navigation systems, and serving as a cost function and curriculum for planning- and learning-based navigation systems.
提供机构:
德克萨斯大学奥斯汀分校计算机科学系
创建时间:
2020-08-31
搜集汇总
数据集介绍
构建方式
在移动机器人导航领域,构建标准化测试环境对于评估算法性能至关重要。BARN数据集采用细胞自动机方法系统生成300个导航环境,通过控制初始填充比例、平滑迭代次数等参数,模拟出具有不同障碍物配置的二维网格地图。每个环境均基于机器人配置空间进行路径规划,确保起点与终点之间存在可行路径,并利用A*算法生成参考轨迹。该方法能够高效产生多样化的仿真场景,同时支持根据机器人尺寸动态调整障碍物膨胀范围,为后续难度量化奠定基础。
使用方法
研究人员可利用该数据集对地面移动机器人导航系统进行标准化测试与性能评估。具体而言,用户可将自有导航算法在300个有序环境中部署运行,通过记录轨迹时间、成功率等指标,与内置的DWA和E-Band规划器基准数据进行对比分析。数据集的难度预测模型可辅助评估新环境的导航挑战,亦能为基于规划或学习的导航系统提供训练课程或代价函数设计参考。数据集提供原始障碍地图与生成工具,支持自定义机器人尺寸与参数,具备良好的可扩展性与复现性。
背景与挑战
背景概述
在移动机器人导航领域,度量地面导航作为自主移动的核心能力,长期以来缺乏系统化、标准化的性能评估基准。2020年,德克萨斯大学奥斯汀分校的Daniel Perille、Abigail Truong、Xuesu Xiao和Peter Stone团队推出了Benchmark for Autonomous Robot Navigation(BARN)数据集,旨在填补这一空白。该数据集通过细胞自动机方法生成了300个模拟导航环境,并定义了距离最近障碍物、平均可见度、分散度、特征维度和曲折度五项难度指标,以量化环境挑战性。BARN的创立为机器人导航系统的性能比较提供了统一测试平台,推动了导航算法在复杂场景下的客观评估与优化,对促进规划型与学习型导航系统的发展具有深远影响。
当前挑战
BARN数据集致力于解决度量地面导航中环境难度量化与系统性能标准化评估的挑战。在领域层面,导航算法常面临非结构化或狭窄空间中的敏捷避障难题,而现有基准多聚焦于感知或状态估计等单一组件,缺乏整体导航性能的系统度量。构建过程中,研究人员需克服环境生成的真实性与多样性平衡问题,通过细胞自动机参数调控来模拟现实障碍布局;同时,设计综合难度指标时,需整合多维度几何特征(如障碍接近度、路径曲折性),并利用数据驱动方法融合各项指标,以准确预测未见过环境的导航难度,确保基准的普适性与可靠性。
常用场景
经典使用场景
在移动机器人导航领域,BARN数据集为度量地面导航系统的性能评估提供了标准化测试平台。该数据集通过细胞自动机方法生成了300个具有不同障碍物配置的仿真环境,并按照路径最近障碍距离、平均可见度、离散度、特征维度和曲折度等五项难度指标进行排序。研究人员通常利用这些环境对动态窗口法、弹性带等经典导航规划器进行系统性测试,通过数千次仿真试验量化不同场景下的导航难度,从而在统一框架下比较各类算法的鲁棒性与效率。
解决学术问题
BARN数据集有效解决了移动机器人导航领域长期缺乏标准化评估体系的问题。传统研究往往依赖个别特定环境进行算法测试,导致结果难以复现与横向比较。该数据集通过量化环境难度与导航性能的关联性,为导航系统的客观评价提供了科学依据。其引入的数据驱动难度预测模型,能够基于几何特征准确预估未知环境的导航挑战,这不仅推动了导航算法评估的规范化进程,也为基于规划与学习的导航系统提供了可量化的训练目标与课程设计基础。
实际应用
在实际机器人部署中,BARN数据集为复杂场景下的导航系统开发与优化提供了重要参考。例如在搜救机器人、仓储物流机器人等需要穿越受限空间的应用中,开发者可利用数据集的难度预测模型预先评估工作环境的导航可行性。数据集生成的障碍地图可直接转换为实体测试场地,通过仿真与实物验证相结合的方式,显著降低算法调试成本与安全风险。此外,其标准化测试流程也为工业界机器人导航模块的选型与认证提供了可量化的性能基准。
数据集最近研究
最新研究方向
在自主机器人导航领域,BARN数据集正推动着导航系统评估范式的革新。该数据集通过引入多维度难度度量指标,如最近障碍物距离、平均可见性、分散度、特征维度和曲折度,并结合数据驱动的函数逼近器,为导航性能提供了系统化、标准化的量化框架。前沿研究聚焦于利用这些度量指标构建自适应导航算法,特别是在复杂受限环境中的路径规划与运动控制优化。热点方向包括将BARN的难度度量作为成本函数或课程学习机制,集成到基于规划与学习的混合导航系统中,以提升机器人在动态、非结构化场景中的鲁棒性与效率。这一进展不仅促进了导航算法的公平比较,还为搜索救援、敏捷机动等实际应用奠定了可靠的测试基础,对推动整个移动机器人领域的标准化发展具有深远意义。
相关研究论文
- 1Benchmarking Metric Ground Navigation德克萨斯大学奥斯汀分校计算机科学系 · 2020年
以上内容由遇见数据集搜集并总结生成


