NYU Franka Play
收藏github2025-03-21 收录
下载链接:
https://play-to-policy.github.io/
下载链接
链接失效反馈官方服务:
资源简介:
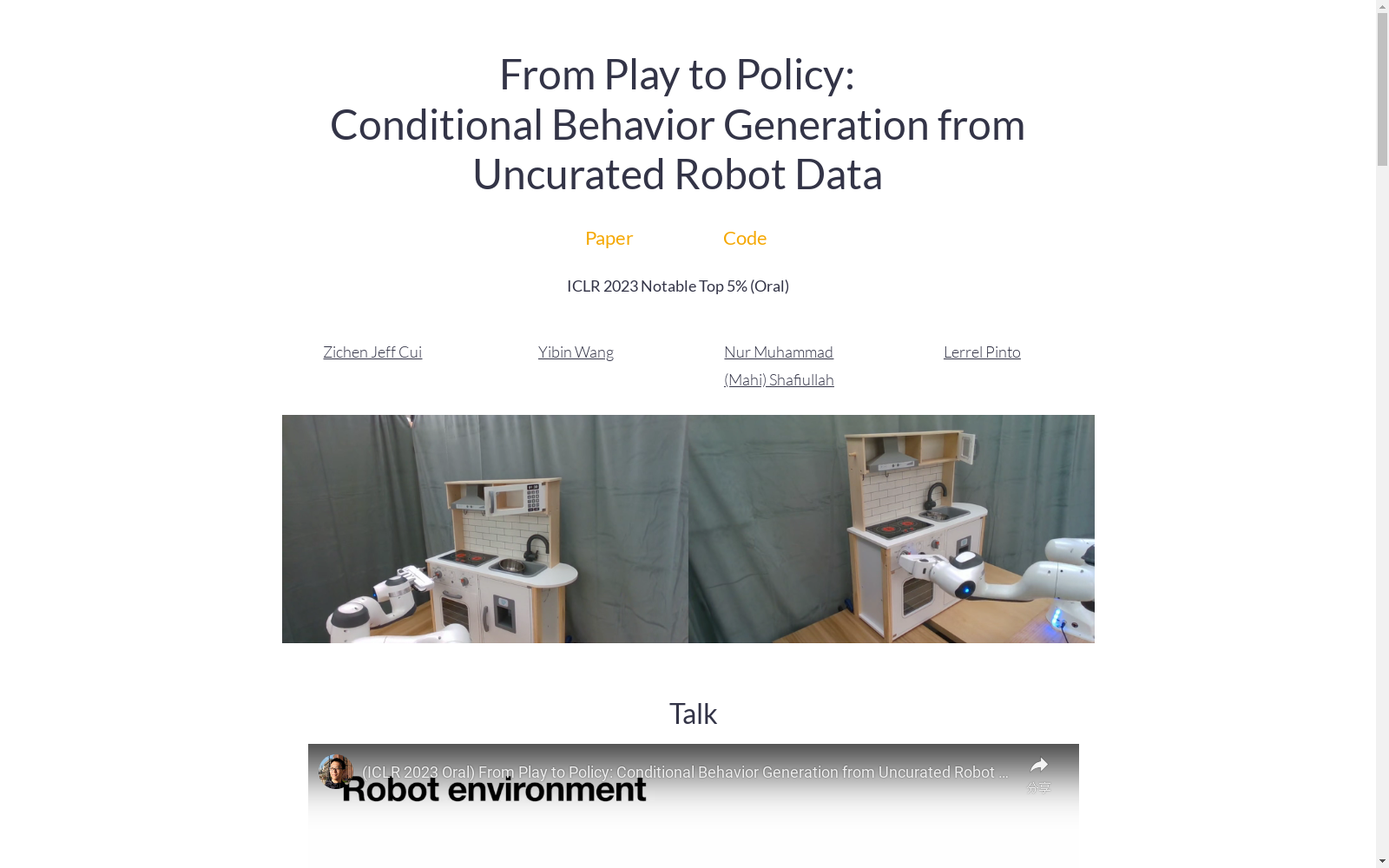
NYU Franka Play 是由纽约大学创建的机器人行为学习数据集,专注于从非专家人类演示者收集的未策划玩乐数据中提取有用的任务中心行为。该数据集包含 460 个序列,总计 265 分钟(约 4.5 小时)的玩乐数据,涵盖儿童玩具厨房中的多种交互行为,如打开烤箱门、微波炉门,移动锅以及旋转旋钮等。数据集通过志愿者使用 Vive VR 控制器操作 Franka Emika Panda 机器人收集而来,包含丰富的视觉和本体感觉信息。
NYU Franka Play is a robot behavior learning dataset created by New York University, which focuses on extracting useful task-centric behaviors from uncurated play data collected from non-expert human demonstrators. This dataset contains 460 sequences, totaling 265 minutes (approximately 4.5 hours) of play data, covering a variety of interactive behaviors in a children's toy kitchen, such as opening oven doors, microwave doors, moving pots, rotating knobs, and more. The dataset was collected by volunteers operating the Franka Emika Panda robot using Vive VR controllers, and includes rich visual and proprioceptive information.
提供机构:
纽约大学
搜集汇总
数据集介绍
构建方式
NYU Franka Play数据集是通过在实验室环境中使用Franka Emika Panda机器人进行多模态数据采集构建的。该数据集涵盖了机器人在执行各种任务时的视觉、触觉和运动数据。数据采集过程中,机器人配备了高分辨率摄像头和力传感器,以捕捉任务执行过程中的动态变化。所有数据均经过严格的时间同步处理,确保多模态数据的一致性。
特点
NYU Franka Play数据集以其丰富的多模态数据著称,涵盖了视觉、触觉和运动信息,为机器人学习与任务规划提供了全面的支持。数据集中包含多样化的任务场景,如物体抓取、堆叠和交互操作,能够有效支持机器人感知与控制算法的开发。此外,数据集还提供了高精度的传感器数据,为研究机器人动态行为和环境交互提供了可靠的基础。
使用方法
使用NYU Franka Play数据集时,研究人员可通过提供的API接口访问多模态数据,包括图像、力传感器读数及机器人运动轨迹。数据集支持多种格式,便于与主流机器学习框架集成。用户可根据研究需求选择特定任务场景的数据进行分析或训练模型。此外,数据集附带详细的文档和示例代码,帮助用户快速上手并开展相关研究。
背景与挑战
背景概述
NYU Franka Play数据集由纽约大学的研究团队于2023年创建,旨在推动机器人学习与交互领域的研究。该数据集的核心研究问题聚焦于机器人在复杂环境中的自主操作与任务执行能力,特别是在家庭和办公场景中的应用。通过提供丰富的多模态数据,包括视觉、触觉和运动信息,该数据集为机器人学习算法的开发与验证提供了重要支持。其影响力不仅体现在学术界,还为工业界提供了机器人智能化解决方案的参考。
当前挑战
NYU Franka Play数据集在解决机器人自主操作问题时面临多重挑战。首先,机器人需要在动态环境中实时感知与决策,这对数据的高精度标注与多模态同步提出了严格要求。其次,构建过程中需克服硬件限制与数据采集复杂性,例如传感器噪声、数据丢失以及多设备协同问题。此外,如何确保数据集在多样性与泛化能力上的平衡,也是研究人员需要解决的关键问题。这些挑战共同构成了该数据集在推动机器人学习领域发展中的核心难点。
常用场景
经典使用场景
NYU Franka Play数据集在机器人学习领域中被广泛用于训练和测试机器人抓取和操作技能。通过提供丰富的机器人操作数据,该数据集为研究人员提供了一个标准化的平台,用于开发和验证各种机器人控制算法。特别是在模拟环境中,数据集的使用使得算法的测试更加高效和安全。
实际应用
在实际应用中,NYU Franka Play数据集被用于开发能够执行复杂任务的机器人系统,如自动化装配线上的零件抓取和放置。这些系统在制造业中具有广泛的应用前景,能够显著提高生产效率和产品质量。此外,数据集还被用于开发服务机器人,帮助老年人和残疾人完成日常生活中的各种任务。
衍生相关工作
基于NYU Franka Play数据集,研究人员已经开发了多种先进的机器人控制算法和模型。例如,一些研究利用该数据集训练深度强化学习模型,使机器人能够在复杂环境中自主学习和优化操作策略。此外,数据集还被用于开发多机器人协作系统,研究如何通过协作提高任务完成效率和质量。
以上内容由遇见数据集搜集并总结生成


