AIRBOT_MMK2_store_pomegranates_and_mangoes
收藏AIRBOT_MMK2_store_pomegranates_and_mangoes 数据集概述
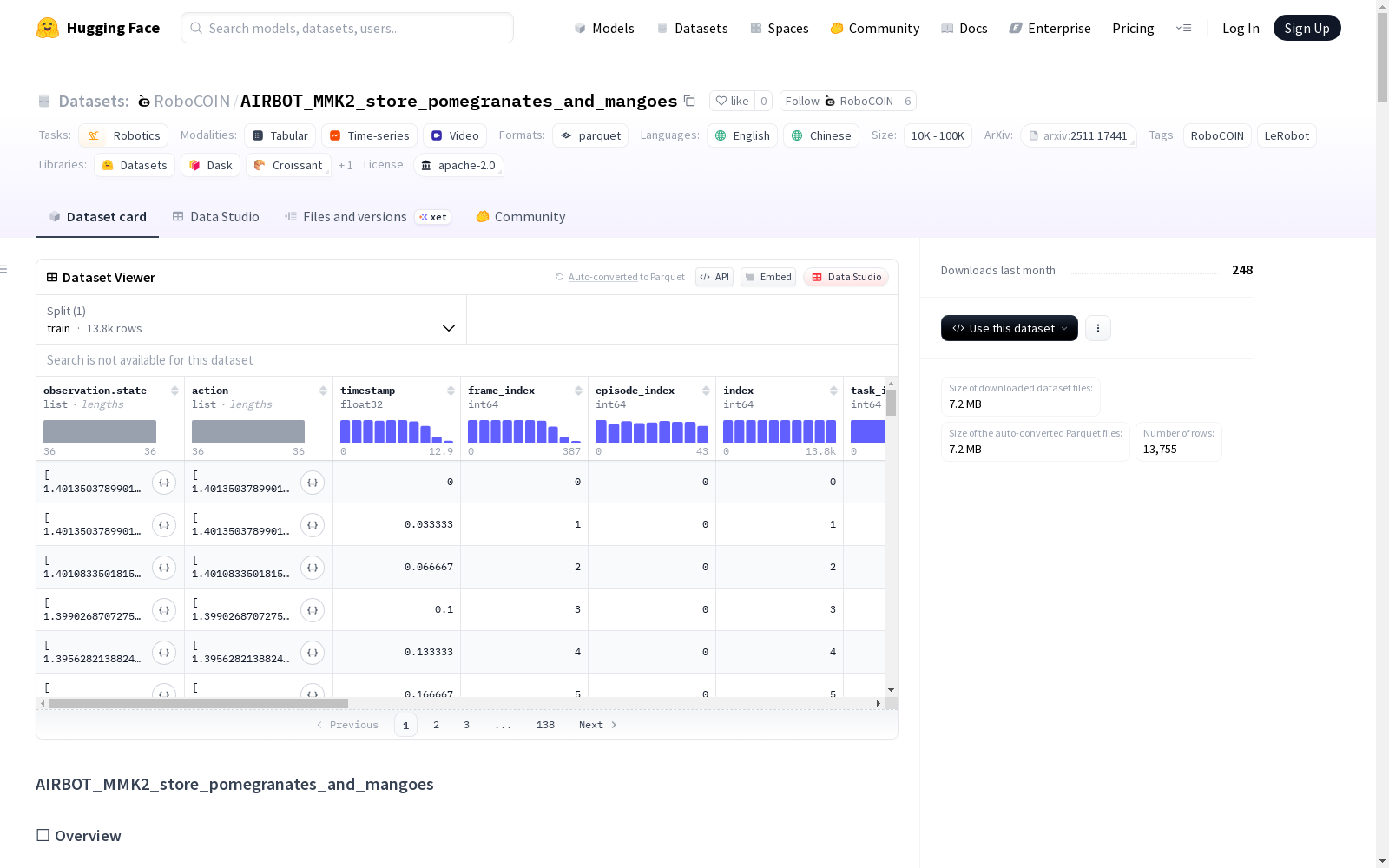
📋 基本信息
- 数据集名称: AIRBOT_MMK2_store_pomegranates_and_mangoes
- 许可证: apache-2.0
- 支持语言: 英语、中文
- 任务类别: 机器人学
- 标签: RoboCOIN、LeRobot
- 规模分类: 10K-100K
🤖 机器人配置
- 机器人类型: AIRBOT_MMK2
- 代码库版本: v2.1
- 末端执行器类型: 五指手
🏠 场景类型
- 家庭环境
⚡ 原子动作
- 抓取
- 拾取
- 放置
📊 数据集统计
| 指标 | 数值 |
|---|---|
| 总情节数 | 44 |
| 总帧数 | 13755 |
| 总任务数 | 1 |
| 总视频数 | 176 |
| 总分块数 | 1 |
| 分块大小 | 1000 |
| 帧率 | 30 |
🎯 任务描述
主要任务
一只手将石榴投入一个隔间,另一只手将芒果投入另一个隔间
子任务
- 结束
- 用右手夹爪抓取芒果
- 用左手夹爪抓取石榴
- 空
- 用右手夹爪将芒果放入储物箱的右隔间
- 用左手夹爪将石榴放入储物箱的左隔间
- 静态
🎥 视觉数据
相机视角
- 4个相机视角:
- 高位RGB相机
- 左手腕RGB相机
- 右手腕RGB相机
- 第三视角相机
视频规格
- 分辨率:480×640
- 帧率:30 FPS
- 编码:AV1
- 像素格式:yuv420p
🏷️ 可用标注
子任务标注
- 细粒度子任务分割和标注
场景标注
- 场景级语义分类和描述
末端执行器标注
- 方向:机器人末端执行器运动方向分类
- 速度:操作过程中的速度幅度分类
- 加速度:运动分析的加速度幅度分类
夹爪标注
- 夹爪模式:夹爪开/关状态标注
- 夹爪活动:活动状态分类(活动/非活动)
附加特征
- 末端执行器仿真位姿:仿真空间中末端执行器的6D位姿信息
- 夹爪开度尺度:连续的夹爪开度测量
📂 数据结构
文件组织
- 数据文件模式:
data/chunk-{episode_chunk:03d}/episode_{episode_index:06d}.parquet - 视频文件模式:
videos/chunk-{episode_chunk:03d}/{video_key}/episode_{episode_index:06d}.mp4
特征架构
视觉观测
observation.images.cam_high_rgb: 视频observation.images.cam_left_wrist_rgb: 视频observation.images.cam_right_wrist_rgb: 视频observation.images.cam_third_view: 视频
状态和动作
observation.state: float32[36]action: float32[36]
运动特征
eef_sim_pose_state: float32[12]eef_sim_pose_action: float32[12]eef_direction_state: int32[2]eef_direction_action: int32[2]eef_velocity_state: int32[2]eef_velocity_action: int32[2]eef_acc_mag_state: int32[2]eef_acc_mag_action: int32[2]
📊 数据划分
- 训练集: 情节0-43
👥 贡献者
- RoboCOIN团队
🔗 相关链接
- 主页: https://flagopen.github.io/RoboCOIN/
- 论文: https://arxiv.org/abs/2511.17441
- 代码库: https://github.com/FlagOpen/RoboCOIN
- 问题反馈: https://github.com/FlagOpen/RoboCOIN/issues
📄 引用信息
bibtex @article{robocoin, title={RoboCOIN: An Open-Sourced Bimanual Robotic Data Collection for Integrated Manipulation}, author={Shihan Wu, Xuecheng Liu, Shaoxuan Xie, Pengwei Wang, Xinghang Li, Bowen Yang, Zhe Li, Kai Zhu, Hongyu Wu, Yiheng Liu, Zhaoye Long, Yue Wang, Chong Liu, Dihan Wang, Ziqiang Ni, Xiang Yang, You Liu, Ruoxuan Feng, Runtian Xu, Lei Zhang, Denghang Huang, Chenghao Jin, Anlan Yin, Xinlong Wang, Zhenguo Sun, Junkai Zhao, Mengfei Du, Mingyu Cao, Xiansheng Chen, Hongyang Cheng, Xiaojie Zhang, Yankai Fu, Ning Chen, Cheng Chi, Sixiang Chen, Huaihai Lyu, Xiaoshuai Hao, Yequan Wang, Bo Lei, Dong Liu, Xi Yang, Yance Jiao, Tengfei Pan, Yunyan Zhang, Songjing Wang, Ziqian Zhang, Xu Liu, Ji Zhang, Caowei Meng, Zhizheng Zhang, Jiyang Gao, Song Wang, Xiaokun Leng, Zhiqiang Xie, Zhenzhen Zhou, Peng Huang, Wu Yang, Yandong Guo, Yichao Zhu, Suibing Zheng, Hao Cheng, Xinmin Ding, Yang Yue, Huanqian Wang, Chi Chen, Jingrui Pang, YuXi Qian, Haoran Geng, Lianli Gao, Haiyuan Li, Bin Fang, Gao Huang, Yaodong Yang, Hao Dong, He Wang, Hang Zhao, Yadong Mu, Di Hu, Hao Zhao, Tiejun Huang, Shanghang Zhang, Yonghua Lin, Zhongyuan Wang and Guocai Yao}, journal={arXiv preprint arXiv:2511.17441}, url = {https://arxiv.org/abs/2511.17441}, year={2025} }
📌 版本信息
- v1.0.0 (2025-11): 初始发布