NTU VIRAL
收藏arXiv2022-02-01 更新2024-06-21 收录
下载链接:
https://ntu-aris.github.io/ntu_viral_dataset/
下载链接
链接失效反馈官方服务:
资源简介:
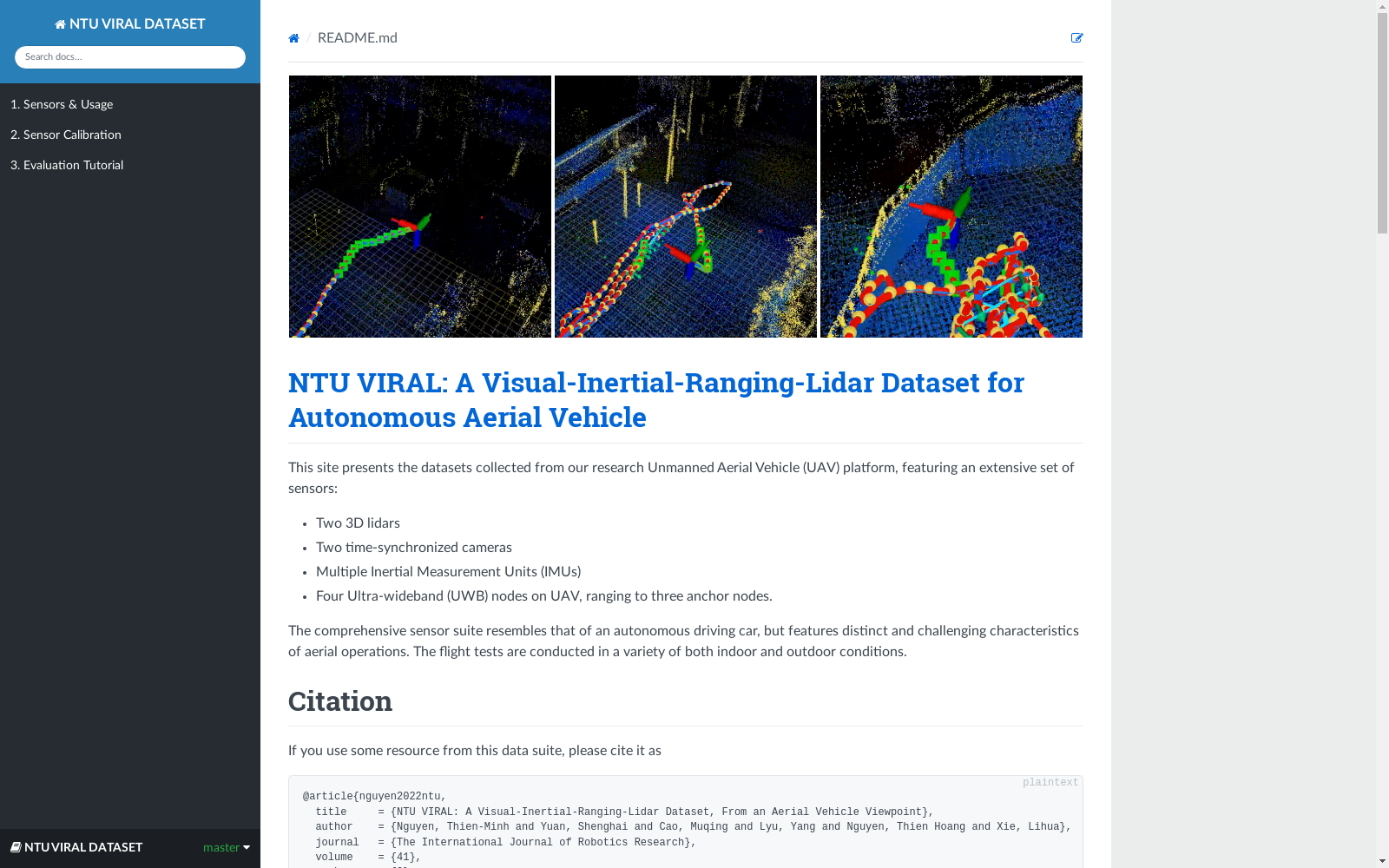
NTU VIRAL数据集是由南洋理工大学创建的,旨在支持自主空中系统的研究。该数据集包含多种传感器数据,包括两个3D激光雷达、两个硬件同步的全局快门相机、多个惯性测量单元(IMUs)以及多个超宽带(UWB)测距单元。这些数据是在多种室内外环境下从空中平台收集的,每个数据包还包括校准结果和高精度激光跟踪器的地面实况。数据集适用于研究在无GPS环境下的自主飞行器导航能力,特别是在极端条件下的视觉惯性测距(VIO)和基于视觉的同时定位与地图构建(SLAM)系统。
The NTU VIRAL Dataset was developed by Nanyang Technological University to support research on autonomous aerial systems. This dataset includes multiple types of sensor data, namely two 3D LiDARs, two hardware-synchronized global shutter cameras, multiple inertial measurement units (IMUs), and multiple ultra-wideband (UWB) ranging units. These data were collected from aerial platforms across various indoor and outdoor environments, and each data packet also includes calibration results and ground truth from a high-precision laser tracker. The dataset is applicable to research on autonomous aerial vehicle navigation capabilities in GPS-denied environments, particularly visual-inertial odometry (VIO) and vision-based simultaneous localization and mapping (SLAM) systems under extreme conditions.
提供机构:
南洋理工大学
创建时间:
2022-02-01
搜集汇总
数据集介绍
构建方式
NTU VIRAL数据集的构建基于一个搭载有丰富独特传感器的空中平台,包括两个3D激光雷达、两个硬件同步的全局快门相机、多个惯性测量单元(IMU)以及多个超宽带(UWB)测距单元。这些传感器共同构成了一个类似于自动驾驶汽车的传感器套件,但具有空中作业的独特挑战性特点。数据集在多种具有挑战性的室内和室外条件下记录,并且每个数据包都包含校准结果和高精度激光跟踪器的真实值。所有资源均可通过网页https://ntu-aris.github.io/ntu_viral_dataset/访问。
特点
NTU VIRAL数据集的特点在于其综合了多种传感器,包括3D激光雷达、全局快门相机、IMU和UWB测距单元,使其能够提供丰富且具有挑战性的空中导航数据。数据集在多种环境条件下收集,包括室内和室外,并包含高精度激光跟踪器的真实值,这为评估定位算法提供了可靠的基础。此外,数据集还以rosbag格式记录,可以直接在机器人操作系统(ROS)中使用,并提供了用于分析定位信息的代码。
使用方法
使用NTU VIRAL数据集时,首先需要下载数据集并解压,然后可以使用ROS工具读取rosbag文件。数据集包含校准参数,这些参数可以在ROS中使用,以便于进行传感器融合和定位算法的测试。此外,数据集还提供了MATLAB脚本,用于计算定位算法的估计精度,并提供了使用最新定位方法的示例,例如OpenVINS、VINS-Fusion、A-LOAM和LIO-SAM。
背景与挑战
背景概述
随着自主机器人在研究和日常生活中的广泛应用,公共数据集在推动该领域进步方面发挥着重要作用。它们降低了硬件和人力资源的初始投资要求,使研究人员能够轻松地调查新的导航方案并在各种场景和环境中进行测试。然而,对于自主空中系统的研发,与自动驾驶和地面机器人相比,缺乏相应的公共数据集。因此,研究人员开展了一项数据收集工作,使用配备有广泛独特传感器的空中平台,包括两个3D激光雷达、两个硬件同步的全局快门相机、多个惯性测量单元(IMU)和多个超宽带(UWB)测距单元。该传感器套件与自动驾驶汽车类似,但具有空中操作的独特挑战性。研究人员在具有挑战性的室内和室外条件下记录了多个数据集,并包含了来自高精度激光跟踪器的校准结果和地面真实数据。所有资源均可通过网页https://ntu-aris.github.io/ntu_viral_dataset/访问。
当前挑战
NTU VIRAL数据集旨在推动自主空中系统的研发,但仍面临一些挑战。首先,该数据集需要解决GPS信号缺失环境下的自主空中系统的导航能力问题。其次,构建过程中遇到的挑战包括:1)由于有效载荷的限制,3D激光雷达往往被排除在外;2)UWB测距传感器在飞行过程中可能会出现信号丢失或多径效应;3)相机曝光设置对于全局快门立体相机来说是一个挑战,需要平衡图像亮度和清晰度;4)由于传感器之间的动态变化,需要精确地进行传感器校准。
常用场景
经典使用场景
NTU VIRAL数据集广泛应用于研究自主飞行器在GPS受限环境下的导航能力。该数据集通过提供多样化的传感器数据,如三维激光雷达、高帧率相机、惯性测量单元(IMU)和超宽带(UWB)测距单元,为研究提供了丰富的实验材料。研究人员可以利用这些数据来测试和验证新的导航方案,例如视觉-惯性里程计(VIO)和基于视觉的同步定位与地图构建(SLAM)系统,从而推动自主飞行器导航技术的发展。
衍生相关工作
NTU VIRAL数据集的发布催生了大量相关的研究工作。例如,基于该数据集,研究人员提出了视觉-惯性-测距-激光雷达(VIRAL)传感器融合方法,实现了高精度定位和地图构建。此外,该数据集还被用于评估和比较各种视觉-惯性里程计和同步定位与地图构建算法的性能,为自主飞行器导航技术的发展提供了重要参考。
数据集最近研究
最新研究方向
NTU VIRAL数据集的发布为无人机自主导航研究提供了宝贵的资源,特别是在GPS受限的环境下。该数据集的最新研究方向集中在利用其丰富的传感器套件,包括双3D激光雷达、双全局快门相机、多IMU和UWB测距单元,来推动视觉-惯性测距-激光雷达(VIRAL)定位和建图技术的发展。研究者们正在探索如何将激光雷达的精确度和UWB测距的稳定性与视觉系统的环境感知能力相结合,以实现更高精度的无人机定位和建图。此外,由于无人机平台的动态特性,该数据集也被用于测试和评估无人机在执行高动态机动时的定位算法性能。这些研究不仅推动了无人机自主导航技术的进步,也对无人机在建筑检查、货物监控等行业的实际应用产生了深远影响。
相关研究论文
- 1NTU VIRAL: A Visual-Inertial-Ranging-Lidar Dataset, From an Aerial Vehicle Viewpoint南洋理工大学 · 2022年
以上内容由遇见数据集搜集并总结生成


