DexterHand
收藏arXiv2026-01-09 更新2026-01-13 收录
下载链接:
https://pku-mocca.github.io/Dextercap-Page/
下载链接
链接失效反馈官方服务:
资源简介:
DexterHand是由北京大学与腾讯机器人X联合开发的精细手-物交互数据集,专注于捕捉复杂的手部操作行为。该数据集包含从简单几何体到魔方等铰接物体的多样化操作序列,多数动作序列时长超过10分钟,通过高密度字符编码标记点实现亚毫米级运动重建。数据采集采用低成本工业相机阵列和自动化处理流程,显著减少了传统动捕系统所需的人工干预。该数据集旨在推动灵巧手部操控、动作生成及人机交互等领域的研究,为解决精细手部运动建模中的遮挡和精度问题提供基准资源。
DexterHand is a fine-grained hand-object interaction dataset jointly developed by Peking University and Tencent Robotics X, focusing on capturing complex hand manipulation behaviors. This dataset includes diverse manipulation sequences ranging from simple geometric shapes to articulated objects such as Rubik's Cube, with most sequences lasting over 10 minutes, and achieves sub-millimeter-level motion reconstruction via high-density character-encoded marker points. It adopts a low-cost industrial camera array and automated processing pipeline for data collection, which significantly reduces the manual intervention required by traditional motion capture systems. This dataset aims to advance research in fields including dexterous hand manipulation, motion generation, and human-computer interaction, providing benchmark resources for addressing occlusion and accuracy issues in fine-grained hand motion modeling.
提供机构:
北京大学; 腾讯机器人X
创建时间:
2026-01-09
原始信息汇总
DexterCap数据集概述
数据集名称
DexterCap
核心描述
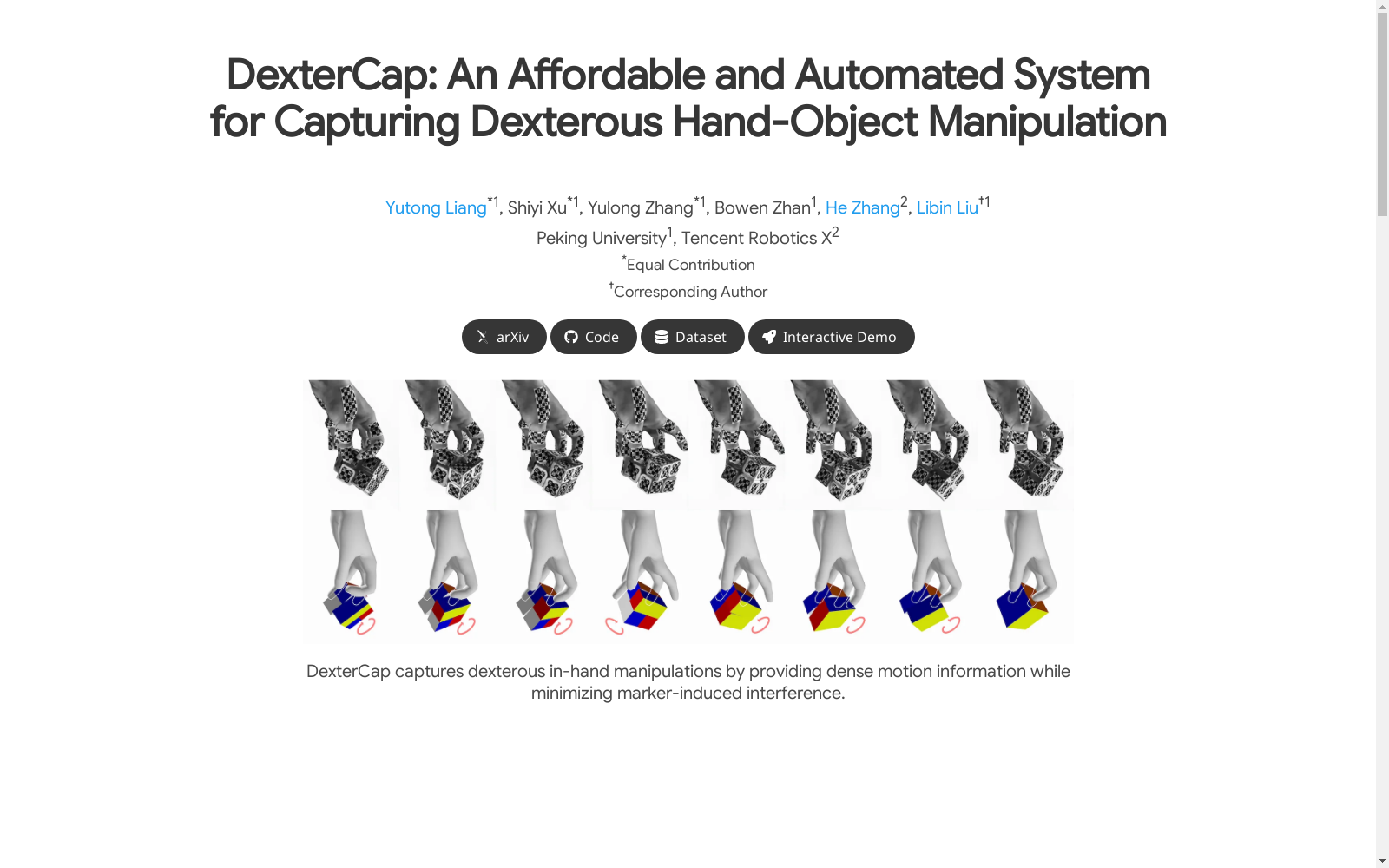
DexterCap是一个用于捕捉灵巧手-物体交互的、经济实惠且自动化的系统。它通过提供密集的运动信息来捕捉灵巧的手持操作,同时最大限度地减少标记引起的干扰。
研究背景与目标
- 建模复杂、细粒度的手-物体交互仍然具有挑战性,部分原因是缺乏专用的数据集和专门的捕捉方法。
- 现有的动作捕捉系统通常仅限于基本运动类型(例如抓握)以及与原始刚性或铰接物体的交互。
- 为了促进对更复杂物体进行精细、灵巧的手持操作探索,研究团队提出了DexterCap。
系统特点
- 硬件系统:设计了一个鲁棒、低成本、高保真度的动作捕捉硬件系统,即使在存在自遮挡和复杂操作的情况下也能获取可靠数据。
- 标记与优化:引入了专门的贴片标记器,配备了有效的检测和优化流程,以确保在严重遮挡情况下的准确捕捉。
- 数据处理:开发了自动化的数据增强流程,以最少的体力劳动重建和细化运动数据,提高了效率和数据质量。
生成的数据集
- 名称:DexterHand数据集。
- 内容:包含细微的、细粒度的操作行为,以及与多关节物体(如魔方)的交互。
系统流程概述
- 视频处理 a. 原始视频 b. 角点检测 c. 边缘分类 d. 块识别
- 手和物体重建
- 手部重建
- 物体重建
数据集中包含的物体示例
- Cuboid 0
- Cuboid 1
- Cuboid 2
- Cylinder
- Plate
- Prism
- Ring
- Rubiks Cube
发布信息
- 已向社区发布数据集和支持的源代码。
- 相关论文已发布于arXiv预印本平台。
- 标题:DexterCap: An Affordable and Automated System for Capturing Dexterous Hand-Object Manipulation
- 作者:Liang, Yutong and Xu, Shiyi and Zhang, Yulong and Zhan, Bowen and Zhang, He and Liu, Libin
- 期刊:arXiv preprint arXiv:2601.05844
- 年份:2026
- 链接:https://arxiv.org/abs/2601.05844
搜集汇总
数据集介绍
构建方式
在灵巧手-物体交互研究领域,高精度、低成本地捕捉细微操作动作一直存在挑战。DexterHand数据集的构建依托于DexterCap系统,该系统采用多视角同步工业相机阵列,以20帧率捕捉附着有密集字符编码标记点的手部与物体运动。通过深度学习驱动的三阶段标记检测与识别模型(CornerNet、EdgeNet、BlockNet),系统实现了在严重自遮挡下的鲁棒跟踪。随后,利用三角测量重建三维标记点,并结合参数化手部模型MANO以及基于Kabsch算法的物体姿态求解器,自动化地重建出高保真的手部关节运动与物体六自由度姿态,最终形成包含多种基础几何体及复杂铰接物体(如魔方)操作的时序数据集。
特点
该数据集的核心特点在于其专注于捕捉精细的掌内操作技能,涵盖了从简单抓取到复杂物体操控的多样化交互行为。数据以高时间分辨率(20 FPS)和长序列(多数超过10分钟)记录,确保了动作的连续性与细节完整性。通过密集标记布局与自动化重建流程,数据集在保持高空间精度(手部标记平均重建误差约2.06毫米)的同时,显著降低了传统光学动捕所需的高昂成本与繁琐人工后处理。此外,数据集包含了魔方等铰接物体的交互序列,为研究复杂操作中的手物协同提供了独特资源。
使用方法
DexterHand数据集适用于灵巧手-物体交互的建模、分析与合成研究。使用者可通过其提供的多视角视频、三维标记点序列、重建的手部MANO参数及物体姿态数据,开展动作识别、运动生成、物理交互仿真等任务。数据集支持对精细操作技能的量化评估,例如通过运动平滑度(Jerk)、信噪比(MSNR)等指标衡量动作质量。研究人员亦可利用其丰富的接触与运动信息,训练数据驱动的抓持预测模型或强化学习策略,推动机器人操作与动画生成等领域的发展。
背景与挑战
背景概述
在计算机视觉与机器人学领域,精确捕捉手部与物体的灵巧交互动作一直是研究的关键难点。DexterHand数据集由北京大学与腾讯Robotics X的研究团队于2026年提出,旨在通过DexterCap系统采集高保真的手部-物体交互数据。该数据集聚焦于精细的手内操控行为,覆盖从简单几何体到复杂关节物体(如魔方)的多样化操作,其核心研究问题在于解决传统运动捕捉系统在严重自遮挡与细微动作重建方面的局限性。DexterHand的发布为手部动作分析、机器人操作学习与人机交互建模提供了高质量的基准资源,推动了相关领域向更自然、更灵巧的交互范式发展。
当前挑战
DexterHand数据集致力于解决手部-物体交互中精细动作捕捉的挑战,其核心问题在于克服手部密集手指间的严重自遮挡以及手内操控动作的微妙性。传统光学运动捕捉系统依赖昂贵设备与繁重人工后处理,而低成本视觉方法在遮挡下常面临精度与鲁棒性不足的困境。在构建过程中,研究团队需应对两大技术难题:一是相机近距离拍摄导致景深有限与手部尺度变化,影响了多尺度下标记点的稳健检测;二是遮挡与噪声导致标记点缺失模式多样,使得手部、手指及物体姿态的完整恢复与精准校准变得异常复杂。
常用场景
经典使用场景
在灵巧手-物体交互研究领域,DexterHand数据集为精细手部操作运动的捕捉与分析提供了关键基准。该数据集通过高密度字符编码标记点与多视角同步采集系统,精确记录了手部与多种物体(从简单几何体到复杂关节结构如魔方)的交互过程,其典型应用场景集中于训练和评估手部姿态估计与运动重建算法。研究者可借助该数据集的高保真三维运动轨迹,深入探究手指在操作过程中的细微运动模式与接触动力学,为理解人类灵巧操作的内在机制提供数据支撑。
衍生相关工作
基于DexterHand数据集所建立的捕捉框架与数据范式,已催生了一系列围绕灵巧手操作的研究工作。例如,在运动捕捉技术层面,其采用的字符编码标记与级联检测模型启发了后续针对严重遮挡场景的鲁棒跟踪算法改进;在数据驱动建模方面,该数据集为手-物接触动力学学习、操作动作生成与物理仿真验证提供了基准,促进了如交互动作合成、仿人机器人技能迁移等方向的发展,并与GRAB、ARCTIC等现有数据集形成互补,共同拓展了手-物交互研究的边界。
数据集最近研究
最新研究方向
在灵巧手-物体交互领域,DexterHand数据集凭借其高精度、低成本的光学捕捉系统DexterCap,正推动前沿研究向更精细、更自然的在手机器人操作与虚拟交互方向发展。该数据集通过密集字符编码标记与自动化重建流程,有效解决了手部严重自遮挡下的跟踪难题,为生成式手部运动合成、物理交互建模及具身智能提供了高质量数据基础。当前研究热点集中于利用此类数据训练端到端的交互预测模型、增强模拟到真实的迁移能力,并探索其在复杂多物体操作、可变形物体交互及双手协同任务中的扩展应用,对提升机器人灵巧操作水平与沉浸式人机交互体验具有深远意义。
相关研究论文
- 1DexterCap: An Affordable and Automated System for Capturing Dexterous Hand-Object Manipulation北京大学; 腾讯机器人X · 2026年
以上内容由遇见数据集搜集并总结生成


